Расчет забежных ступеней | Все о ремонте и строительстве
Для сокращения размера лестничной клетки по ее длине, вызванную недостатком места, промежуточную межлестничную площадку не делают, а помещают вместо нее забежные ступеньки, с шириной по линии движения, равной ширине прямых ступеней. Такие ступеньки неудобны, особенно при спуске с лестницы, так как ширина их по мере приближения к центру уменьшается и становится недостаточной для установки ноги. В противоположном конце ступени ширина, наоборот, увеличивается и становится шире среднего шага человека. В этом случае на повороте лестницы желательно делать закругление стен лестничной клетки, этим сокращается длина и ширина ступеней, следовательно и расходы на устройство лестницы. Узкий конец проступи забежной ступеньки всегда должен быть не менее 100 мм.
Чтобы сгладить описанные неудобства забежных ступеней, необходимо, во-первых, допускать их устройство лишь при условии горизонтального расстояния между параллельными маршами, по крайней мере, в 1/4 их ширины и, во-вторых, прибегать к расчету ширины ступеней по одному из следующих графических способов, основанных на пропорциональном уширении концов забежных ступеней за счет ширины прямых.
Предположим, что мы имеем лестницу с двумя параллельными маршами и поворотом на забежных ступенях. Требуется рассчитать ширину забежных ступенек, заменяющих межэтажную площадку.
Проводим посредине марша (рис. 9, вверху слева) линию a b c называемую средней линией движения, на которую наносим ширины проступей, начиная от вершины закругления, распределяя ступени так, чтобы вертикальная линия BC разделяла среднюю ступеньку по ее ширине на две равные части. Таким образом получим деления  Затем соединяем эти точки прямыми линиями с соответствующими по номерам точками, намеченными по линии движения. В результате графического расчета получаем в горизонтальной проекции форму проступей забежных ступеней левой половины лестницы. Так же поступаем для правой половины лестницы.
Затем соединяем эти точки прямыми линиями с соответствующими по номерам точками, намеченными по линии движения. В результате графического расчета получаем в горизонтальной проекции форму проступей забежных ступеней левой половины лестницы. Так же поступаем для правой половины лестницы.
Другой способ (рис. 9, вверху справа) регулировки забежных ступеней состоит в следующем: начиная от точки b по линии движения, откладывают ширину проступей согласно принятой норме, но так, чтобы вертикальная линия 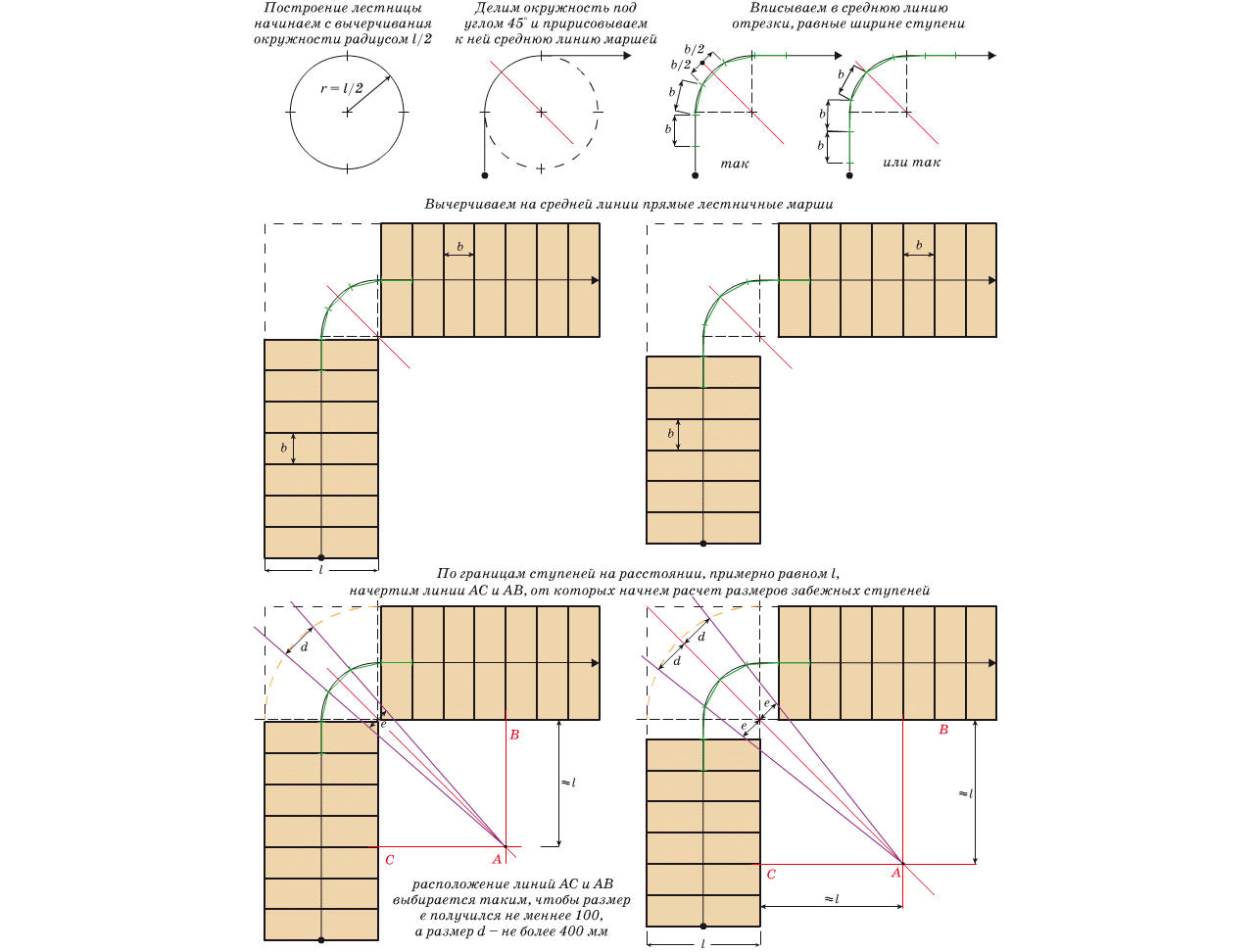
Соединив точку С с точкой B и проведя из каждой точки деления линии, параллельные ВС, мы получим на вертикали АВ соответствующие отрезки. Остается только соединить точки деления с точками 2, 3, 4 и т. д. на средней линии движения и продолжить их до стены, окружающей клетку, чтобы получить размеры и форму проступей забежных ступеней в горизонтальной проекции.
Аналогично рассчитываются и двухмаршевые лестницы с радиальным поворотом на 90°. Сначала вычерчивается средняя линия марша (рис. 9 внизу). Затем, начиная от центра дуги, в обе стороны от него откладываются отрезки (хорды), равные ширине рядовой ступени. Возможны два варианта расположения забежных ступеней в центре поворота, когда одна ступень делит линию  Далее, выбирается ступень, от которой будут начинаться забежные ступени и проводится линия ЕВ, она должна пересечься с линией СА, проведенной через центр закругления лестницы. В месте пересечения поставим точку В. Из точки А
Далее, выбирается ступень, от которой будут начинаться забежные ступени и проводится линия ЕВ, она должна пересечься с линией СА, проведенной через центр закругления лестницы. В месте пересечения поставим точку В. Из точки А
Лестницы с радиальным поворотом марша сложны для изготовления, для них нужно изготавливать гнутые косоуры, тетивы или делать под ступени другие опоры, повторяющие радиус изгиба лестницы.
Необходимо отметить, что графические расчеты размеров забежных ступенек — неидеальны и показывают не совсем точный результат. Поэтому в конце отрисовки лестницы допускается слегка изменять размеры ступеней, но так, чтобы ширина ступени по линии движения оставалась нетронутой. То есть у некоторых забежных ступеней можно изменить размер концов ступеней, слегка сужая или расширяя их, но ширина проступи (ступени) в середине должна остаться прежней. При снятии размеров с чертежа проверяйте размерную цепочку всех ступеней путем сложения, так чтобы сумма размеров, снятых с одной стороны ступеней не получилась больше или меньше действительного размера лестницы на этом участке.
Калькулятор расчета лестницы с забежными ступенями на 90
Исходные данные
Лестница
Проём
Ступени
Подступенки
Косоуры (Тетива)
Результаты расчёта
Лестница
Ступени
Косоуры (Тетива)
Подступенки
Поручни
Информация
В данный онлайн калькулятор интегрирована система для того чтобы вы могли произвести расчет лестницы на второй этаж с поворотом на 90 градусов и с забежными ступенями не обладая навыками проектировщика и не имея особых знаний в области строительства. Эта программа создана людьми, для людей. Простота и удобство использования, логически понятный интерфейс, помогут вам произвести, казалось бы, сложный расчет всего в пару кликов.
Эта несложная программа способна произвести для вас высокоточный автоматический расчет, будь то деревянные или металлические лестницы. Давайте вместе попробуем разобраться, что же представляет собой, прежде всего сама конструкция лестницы с забежными ступенями. Данный вид лестницы служит не только для удобного перемещения между этажами, но и значительно экономит пространство в сравнении с обычными маршевыми лестницами. За счет отсутствия как таковой меж маршевой площадки, повышается ее эстетический вид, благодаря которому она отлично вписывается в любой современный декор. Ввиду того что междуэтажная площадка выполнена в виде ступеней, вы экономите на материале при возведении данного конструктивного элемента.
Чтобы произвести расчет лестницы с забежными ступенями с поворотом на 90 градусов, вам потребуются некоторые исходные данные:
- Стандартные размеры, длины и ширины;
- Размеры проема, где будет находиться забежная лестница;
- Ну и самое пожалуй основное это геометрические размеры ступеней.


В последнем пункте, необходимо знать и учитывать некоторые особенности.
В самих забежных ступенях рекомендуется использовать следующие размеры:
- На узких участках наиболее удобным размером считается 100 мм.
- В центральной части ступени усредненный размер необходимо сводить к 250 мм.
- Ну а на самом широком участке специалисты рекомендуют использовать глубину ступени не более 400 мм.
Высоту шага в данном случае лучше принимать по стандарту в пределах 15-20 см. А наклон косоура для удобного подъема и спуска 30 – 40 градусов. Так же следует учитывать особенности материала, из чего вы планируете выполнить саму лестницу. Это может быть и металл и дерево, бетон и даже стекло. Последнее о чем не стоит забывать при расчете лестницы это нависание поступи над подступенком, максимальный размер для такого вида лестницы не должен превышать 5 см.
Результаты расчета.
Если следовать правилам и рекомендациям и правильно ввести исходные данные, в результате вы получите: максимально точный чертеж г образной лестницы на второй этаж, расчет самой лестницы выполненный по всем правилам ГОСТа, а так же безопасную и комфортную конструкцию после ее монтажа.
Расчет забежных ступеней лестницы
Для сокращения размера лестничной клетки по ее длине, вызванную недостатком места, промежуточную межлестничную площадку не делают, а помещают вместо нее забежные ступеньки, с шириной по линии движения, равной ширине прямых ступеней.
Такие ступеньки неудобны, особенно при спуске с лестницы, так как ширина их по мере приближения к центру уменьшается и становится недостаточной для установки ноги. В противоположном конце ступени ширина, наоборот, увеличивается и становится шире среднего шага человека. В этом случае на повороте лестницы желательно делать закругление стен лестничной клетки, этим сокращается длина и ширина ступеней, следовательно и расходы на устройство лестницы. Узкий конец проступи забежной ступеньки всегда должен быть не менее 100 мм.
Чтобы сгладить описанные неудобства забежных ступеней, необходимо, во-первых, допускать их устройство лишь при условии горизонтального расстояния между параллельными маршами, по крайней мере, в 1/4 их ширины и, во-вторых, прибегать к расчету ширины ступеней по одному из следующих графических способов, основанных на пропорциональном уширении концов забежных ступеней за счет ширины прямых.
Рис. 9. Два графических способа расчета размеров забежных ступеней
Предположим, что мы имеем лестницу с двумя параллельными маршами и поворотом на забежных ступенях. Требуется рассчитать ширину забежных ступенек, заменяющих межэтажную площадку. Проводим посредине марша (рис. 9, а) линию a b c называемую средней линией движения, на которую наносим ширины проступей, начиная от вершины закругления, распределяя ступени так, чтобы вертикальная линия BC разделяла среднюю ступеньку по ее ширине на две равные части.
Таким образом получим деления 1, 2, 3, 4 и т. д. Чем больше прямых ступеней войдет в расчет, тем удобнее будет лестница и тем незаметнее будет переход от прямых ступеней к забежным. В данном случае из прямых ступеней, показанных на рис. 11 пунктирно, мы захватываем три — 6, 7 и 8. Проведя горизонтальную линию DE, ограждающую прямую ступеньку 8, с которой мы начинаем регулировку ширины проступи, соединяем центр А с делениями 1 и 2 на линии движения.
Продолжая эти линии до пересечения с горизонтальной DE, получим на ней отрезок 1-2, откладывая который по направлению от D к E находим точки 3, 4, 5, 6 и 7. Затем соединяем эти точки прямыми линиями с соответствующими по номерам точками, намеченными по линии движения. В результате графического расчета получаем в горизонтальной проекции форму проступей забежных ступеней левой половины лестницы. Так же поступаем для правой половины лестницы.
Другой способ (рис. 9, б) регулировки забежных ступеней состоит в следующем: начиная от точки b по линии движения, откладывают ширину проступей согласно принятой норме, но так, чтобы вертикальная линия DВ разделяла среднюю ступеньку 1 вдоль на две равные части.
Затем, задавшись числом прямых ступеней, входящих в регулировку (в данном случае три ступеньки: 6, 7 и 8) и, получив таким образом отрезок АВ от вертикальной линии DВ, проводят к этому отрезку наклонную АС произвольной длины под любым острым углом, и на ней наносят 7 делений, соответственно семи регулируемым ступенькам, в любом масштабе, но так чтобы размеры этих делений последовательно увеличивались на одну часть, причем от точки А первое деление должно равняться 2, второе — 3, третье — 4 частям и т. д.
д.
За одну часть можно произвольно принять, например, отрезок в 3, 5 или 10 мм, это зависит от размера бумаги и масштаба рисования лестницы. Соединив точку С с точкой B и проведя из каждой точки деления линии, параллельные ВС, мы получим на вертикали АВ соответствующие отрезки. Остается только соединить точки деления с точками 2, 3, 4 и т. д. на средней линии движения и продолжить их до стены, окружающей клетку, чтобы получить размеры и форму проступей забежных ступеней в горизонтальной проекции.
Аналогично рассчитываются и двухмаршевые лестницы с радиальным поворотом на 90°. Сначала вычерчивается средняя линия марша (рис. 9 в, г). Затем, начиная от центра дуги, в обе стороны от него откладываются отрезки (хорды), равные ширине рядовой ступени. Возможны два варианта расположения забежных ступеней в центре поворота, когда одна ступень делит линию АС пополам или когда две ступени примыкают к этой линии с двух сторон.
По разметке линии движения (средней линии) вырисовывается план лестницы со ступенями. Далее, выбирается ступень, от которой будут начинаться забежные ступени и проводится линия ЕВ, она должна пересечься с линией СА, проведенной через центр закругления лестницы. В месте пересечения поставим точку В. Из точки А под любым углом и любой длины проведем линию АD. Разделим линию АD на участки. От точки А первое деление должно равняться 2, второе — 3, третье — 4 частям и т. д.
Далее, выбирается ступень, от которой будут начинаться забежные ступени и проводится линия ЕВ, она должна пересечься с линией СА, проведенной через центр закругления лестницы. В месте пересечения поставим точку В. Из точки А под любым углом и любой длины проведем линию АD. Разделим линию АD на участки. От точки А первое деление должно равняться 2, второе — 3, третье — 4 частям и т. д.
За одну часть принимаем произвольный размер. Соединим конец последнего участка с точкой В. Параллельно полученной линии ВD проведем линии по концам всех участков (точкам 2, 3, 4 и т. д.) до пересечения их с линией АВ. Места пересечений соединяем линиями с соответствующими точками 1, 2, 3 и т. д. на линии движения и продлеваем их до стены лестничной клетки. Обведем габариты вычерченных забежных ступеней и снимем размеры с поправкой на масштаб.
Лестницы с радиальным поворотом марша сложны для изготовления, для них нужно изготавливать гнутые косоуры, тетивы или делать под ступени другие опоры, повторяющие радиус изгиба лестницы. Поэтому, поворотные лестницы с забежными ступенями чаще изготавливают без радиуса изгиба, а просто с прямым поворотом на 90°.
Поэтому, поворотные лестницы с забежными ступенями чаще изготавливают без радиуса изгиба, а просто с прямым поворотом на 90°.
Расчет размеров таких лестниц ведется графическим методом пропорций. Поскольку лестницы с поворотом на 90° более технологичны в изготовлении и могут быть сделаны в домашних условиях, приведем этот расчет полностью. Вся последовательность отрисовки плана лестницы изображена на рисунке 10.
Рис. 10. Расчет забежных ступеней двухмаршевой лестницы с поворотом на 90°
Необходимо отметить, что графические расчеты размеров забежных ступенек — неидеальны и показывают не совсем точный результат. Поэтому в конце отрисовки лестницы допускается слегка изменять размеры ступеней, но так, чтобы ширина ступени по линии движения оставалась нетронутой.
То есть у некоторых забежных ступеней можно изменить размер концов ступеней, слегка сужая или расширяя их, но ширина проступи (ступени) в середине должна остаться прежней. При снятии размеров с чертежа проверяйте размерную цепочку всех ступеней путем сложения, так чтобы сумма размеров, снятых с одной стороны ступеней не получилась больше или меньше действительного размера лестницы на этом участке.
При снятии размеров с чертежа проверяйте размерную цепочку всех ступеней путем сложения, так чтобы сумма размеров, снятых с одной стороны ступеней не получилась больше или меньше действительного размера лестницы на этом участке.
как подобрать ступени для лестницы
Каждый, кто строит дом для своей семьи, хочет, чтобы он получился красивым, прочным и уютным. Нужно учесть множество важных моментов. Так, если дом небольшой, приходится рассчитывать каждый сантиметр полезного пространства. Что делать, если нужна лестница на второй этаж или крыльцо на веранду, а места – минимум? На этот случай придуманы забежные ступени для лестницы. Что это такое и как рассчитать «компактную» лестницу, мы расскажем дальше.
Зачем нужна извилистая лестница
Для начала разберемся с определением. Ступенька, у которой стороны непараллельные (внутренний край уже внешнего) называется забежной. Для безопасности пользования ширина узкого приступа должна быть не менее 10 см, в центральной части проступи (куда ступает нога) – минимум 22 см.
Основные причины установки забежных лестниц:
- экономия пространства. Этот вид конструкций – самый малогабаритный;
- обязательный элемент дизайнерского проекта здания (для поворотных винтовых лестниц, маршей).
Такие конструкции смотрятся аккуратно и оригинально, вписываются практически в любой стиль, позволяют сделать выполнить любой поворот на лестнице, могут изготавливаться из различных материалов (дерева, металла, бетона).
Бетонные лестницы нуждаются в дополнительной облицовке — http://www.vipklinker.com.ua/vip/klinkernyy_kirpich. Отделка придает ступеням эстетичность и надежность. Для лестниц снаружи и внутри дома широко используются клинкерные ступени для лестницы – уже готовые элементы облицовки.
Забежные ступени имеют и слабые стороны:
- сложная проектировка;
- спускаться по ступеням менее удобно, особенно для пожилых людей. По статистике, на поворотных лестницах люди травмируются на 10% чаще, чем на прямомаршевых;
- при установке лестницы нужна точная подгонка.
Чтобы свести риск травмирования к минимуму, следует правильно вычислить все параметры будущей поворотной лестницы, провести подгонку и только затем приступать к монтажу конструкции.
Как рассчитать забежные ступени: способы расчета
Есть 2 основных типа лестниц с забежными ступенями:
- Г-образная конструкция с поворотом на 90 0 – самое популярное решение для небольших частных домов, дач. Представляет собой промежуточный вариант между винтовой и прямомаршевой лестницей. Поворот выводится в любом месте лестницы, чаще всего внизу. Наиболее безопасный и практичный вид забежных конструкций;
- с поворотом на 1800. П-образная конструкция позволяет мягко сменить направление движения в противоположную сторону. Здесь забежные и обычные ступени чередуются друг с другом. Проект в каждом случае рассчитывается индивидуально.
В зависимости от вида поворотного сооружения, существует несколько способов расчета конструкции:
- Датский метод. В заданном масштабе чертят горизонтальное изображение (проекцию) будущей лестницы, откладывают среднюю линию. Определяют, где будут начинаться забежные ступеньки и отмечают как точку А на внутреннем несущем элементе. На тетиве ставят точку В – она определяет, где начинается средняя ступень.Маршевую среднюю линию делят на отрезки, они по ширине равны забежным элементам. Потом из концов отрезков нужно отложить перпендикулярные линии. На полученных отрезках обозначить наименьшую ширину элементов. Затем точки А и В соединить: полученный отрезок – это самая узкая часть ступенек. Данные переносят на чертеж, соединяют с точками на средней маршевой линии. Вот так определяется размер забежных элементов.
- Расчет забежных ступеней методом пропорций – подходит для сооружений с углами 90 и 180 градусов.
 В заданном масштабе чертят горизонтальное изображение (проекцию) будущей лестницы, откладывают среднюю линию. Определяют, где будут начинаться забежные ступеньки и отмечают как точку А на внутреннем несущем элементе. На тетиве ставят точку В – она определяет, где начинается средняя ступень.Маршевую среднюю линию делят на отрезки, они по ширине равны забежным элементам. Потом из концов отрезков нужно отложить перпендикулярные линии. На полученных отрезках обозначить наименьшую ширину элементов. Затем точки А и В соединить: полученный отрезок – это самая узкая часть ступенек. Данные переносят на чертеж, соединяют с точками на средней маршевой линии. Вот так определяется размер забежных элементов.
В заданном масштабе чертят горизонтальное изображение (проекцию) будущей лестницы, откладывают среднюю линию. Определяют, где будут начинаться забежные ступеньки и отмечают как точку А на внутреннем несущем элементе. На тетиве ставят точку В – она определяет, где начинается средняя ступень.Маршевую среднюю линию делят на отрезки, они по ширине равны забежным элементам. Потом из концов отрезков нужно отложить перпендикулярные линии. На полученных отрезках обозначить наименьшую ширину элементов. Затем точки А и В соединить: полученный отрезок – это самая узкая часть ступенек. Данные переносят на чертеж, соединяют с точками на средней маршевой линии. Вот так определяется размер забежных элементов.Лучший вариант – сделать чертеж в натуральном размере. Если нет такой возможности, можно выполнить проекцию в заданном масштабе. Сначала делают горизонтальное изображение конструкции, проводят среднюю линию, на которую наносят отрезки, соответствующие ширине проступей.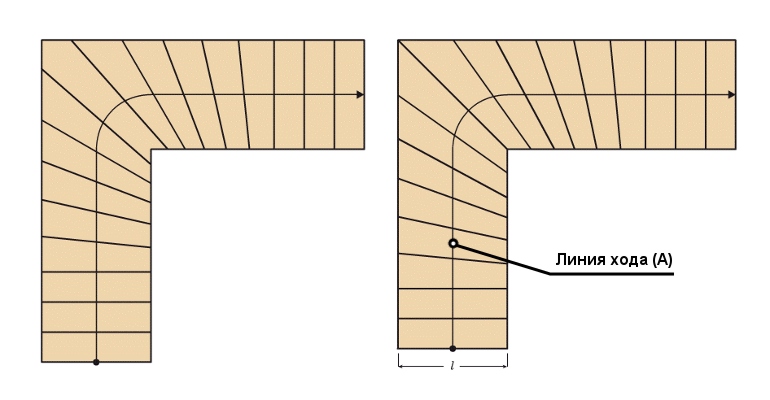
Дальше нужно вычислить размеры забежных деталей. Делается таким образом: берут максимальный и минимальный размер седины марша. С обеих сторон среднего отрезка отложить половину. Определятся точки, их соединяют отрезками, которые продлевают и соединяют с осью лестницы.
Получившийся отрезок (АВ) делят на определенные отрезки – это количество забежных ступеней. Границы каждой детали можно определить, разделив ось марша на количество этих отрезков и проведя через точки средней линии и маршевой оси линии.
Если ширина забежных ступеней получится меньше допустимой, нужно уменьшить количество элементов.
Провести расчет самостоятельно или доверить специалистам?
Как видите, расчет поворотных конструкций с забежными ступенями – дело, требующее ювелирной точности и определенных навыков. От правильности вычислений зависит не только внешний вид готового сооружения, но и возможность каждый день удобно и безопасно пользоваться лестницей. Форма такой лестницы – сложная, поэтому заниматься расчетами лучше доверить специалистам.
Лестница с забежными ступенями станет удобным и красивым элементом дома, если грамотно выполнить расчеты и грамотно смонтировать конструкцию. Эксклюзивная отделка ступеней придаст лестнице особый шарм и сделает долговечней.
Как рассчитать лестницу с забежными ступенями
При расчете и проектировании лестницы в двухэтажном доме или двухуровневой квартире частой проблемой является недостаток свободного места для ее установки. В такой ситуацие отличным решением будет деревянная лестница с забежными ступенями. Но такая конструкция имеет свои особенности в расчете и установке, об этом и поговорим ниже.
Описание и особенности
Лестница с забежными ступенями представляет из себя маршевую лестницу с поворотом на 90 или 180 градусов. Ее особенностью являются забежные ступени, позволяющие значительно сэкономить площадь которую занимает лестница после установки. Забежные ступени устанавливаются в месте поворота лестницы вместо промежуточной площадки.
Рассмотрим основные преимущества и недостатки. К плюсам лестниц такой конструкции можно отнести:
К плюсам лестниц такой конструкции можно отнести:
- занимают мало места
- эстетическая привлекательность
- визуально делают помещение шире
к минусам:
- сложность расчетов
- забежные ступени уже обычных, что вызывает неудобства
- повышенная травмоопасность
Как рассчитать лестницу с забежными ступенями
Прежде чем приступать к проектированию, вы должны понимать, что любой расчет это сложная процедура, которая требует определенных знаний и применение специальных формул. Поэтому чтобы избежать ошибок и проблем в дальнейшем рекомендуется использовать специальные программы, например AutoCAD, StairDesigner, Compass, или воспользоваться услугами специалистов.
Изготовление любой лестницы из дерева начинается с расчетов габаритов и представления ее графически. Перед расчетом габаритов следует помнить о рекомендуемых размерах элементов лестницы, а именно:
- ширина марша лестницы в частном доме должна составлять 600 — 700 мм для одного человека, но не стоит забывать о возможности встречного движения, поэтому оптимальной шириной будет 900 мм
- угол наклона. Идеальным соотношением высоты марша к его горизонтальной проекции равняется 1:2 — 1:1.75, в таком случае наклон лестницы около 30º. Если места недостаточно, то максимальным допустимым наклоном считается 40º, что в соотношении марша к проекции равно 1:1.25
- толщина проступи обычно зависит от ширины марша в соотношении 1:20, так например для марша шириной 900 мм толщина проступи должна быть около 45 мм
- особых требований к подступенку нет, он может быть изготовлен из любого дерева, а рекомендованная толщина 15 — 25 мм. Также часто для изготовления подступенков используется шпонированная фанера
- косоуры должны быть прямыми и без сучков, ширина доски из которого они изготовлены должна быть 250 — 300 мм, а толщина 40 — 70 мм
- для удобного спуска и подъема перила устанавливаются на уровне около 900 мм
- размеры ступеней должны соответствовать формуле 2*h + b = 600…650 мм, где h это высота ступени, и b ее ширина. Комфортной высотой считается размер 140 — 180 мм, а ширина 250 — 300 мм
- количество забежных ступеней рекомендуется делать три, реже четыре штуки. Все зависит от конкретной ситуации
 Идеальным соотношением высоты марша к его горизонтальной проекции равняется 1:2 — 1:1.75, в таком случае наклон лестницы около 30º. Если места недостаточно, то максимальным допустимым наклоном считается 40º, что в соотношении марша к проекции равно 1:1.25
Идеальным соотношением высоты марша к его горизонтальной проекции равняется 1:2 — 1:1.75, в таком случае наклон лестницы около 30º. Если места недостаточно, то максимальным допустимым наклоном считается 40º, что в соотношении марша к проекции равно 1:1.25 Все зависит от конкретной ситуации
Все зависит от конкретной ситуацииДеревянная лестница с забежными ступенями своими руками
Начать расчет лестницы из дерева нужно с определения количества ступеней, для этого нужно взять расстояние от пола первого этажа до пола второго этажа и разделить на примерную высоту ступени. Рассмотрим на примере, где высота лестницы 2700 мм, а длина свободного места выделенного для лестницы 3300 мм.
Габариты будущей лестницыРазделив расстояние между полами первого и второго этажа на среднюю рекомендованную высоту ступени 2700 / 155, мы получаем количество ступеней равное 17,41 штук, округляем до 17 штук и отнимаем одну ступень, так как пол второго этажа уже является одной из ступеней нашей будущей лестницы. Таким образом мы получаем количество ступеней равное 16. Разделив высоту лестницы на количество ступений мы получаем точный размер нашей ступени, равный 169 мм.
На следующем этапе расчета нужно решить сколько прямых ступеней будет до поворота лестницы и соответственно до забежных ступеней.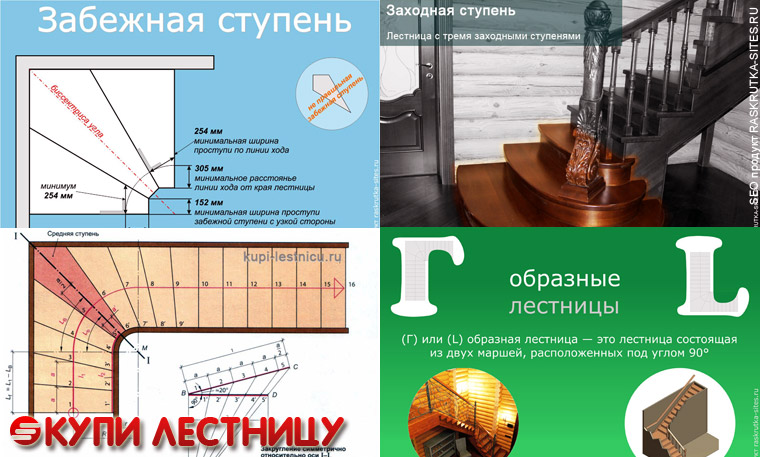 Предположим, что прямых ступеней будет три. Следующим элементом лестницы будет поворот с забежными ступенями. Первым делом нужно определиться с шириной лестничного марша, так как для поворота лестницы на 90 градусов необходимо выделить пространство для забежных ступеней в виде квадрата, стороны которых имеют длину равную ширине лестничного марша. Возьмем за ширину лестничного марша размер в 900мм. Теперь зная размер элемента с забежными ступенями и количество ступеней после, мы можем рассчитать ширину ступени. В нашем случае количество ступеней в верхнем марше 10 штук (общее количество ступеней 16, 3 ступени до поворота, 3 забежные ступени)
Предположим, что прямых ступеней будет три. Следующим элементом лестницы будет поворот с забежными ступенями. Первым делом нужно определиться с шириной лестничного марша, так как для поворота лестницы на 90 градусов необходимо выделить пространство для забежных ступеней в виде квадрата, стороны которых имеют длину равную ширине лестничного марша. Возьмем за ширину лестничного марша размер в 900мм. Теперь зная размер элемента с забежными ступенями и количество ступеней после, мы можем рассчитать ширину ступени. В нашем случае количество ступеней в верхнем марше 10 штук (общее количество ступеней 16, 3 ступени до поворота, 3 забежные ступени)
(3300 — 900) / 10 = 240 мм
Имея ширину и высоту ступени, мы можем проверить, будут ли они удобными для хождения используя формулу 2 h + b = 600…650 мм.
2*169 + 240 = 578
Как мы видим 578 мм гораздо меньше рекомендованных 600 — 650 мм, поэтому для увеличения ширины проступи нам нужно сократить количество ступеней после поворота. Для этого можно увеличить количество ступений до поворота или увеличить количество забежных ступеней до четырех. Мы увеличим количество ступеней перед поворотом до четырех штук, уменьшив тем самым количество после поворота. Проведем еще раз наши расчеты с шириной проступи:
Для этого можно увеличить количество ступений до поворота или увеличить количество забежных ступеней до четырех. Мы увеличим количество ступеней перед поворотом до четырех штук, уменьшив тем самым количество после поворота. Проведем еще раз наши расчеты с шириной проступи:
(3300 — 900) / 9 = 267 мм
Ширина увеличилась. Проверим теперь комфорт передвижения с такими размерами
2*169 + 267 = 605 мм
Такой результат попадает в рекомендованные значения, а это значит, что спуск и подъем по лестнице будет комфортным.
Теперь зная размер и количество ступеней до и после поворота, мы можем вычислить угол наклона лестницы и проверить попадает ли он в рекомендованный диапазон.
Для этого нам нужно узнать высоту последнего марша и длину его проекции на пол. Высоту мы можем получить умножив количество ступеней до него на их высоту и вычесть это значение из общей высоты
2700 — 7*169 = 1517
Длина проекции будет равна разнице длины ниши и площадки для забежных ступеней
3300 — 900 = 2400
Зная эти данные и воспользовавшись формулой угла тангенса мы сможем определить угол наклона лестницы, который равен примерно 32º, данный результат попадает в рекомендованный диапазон.
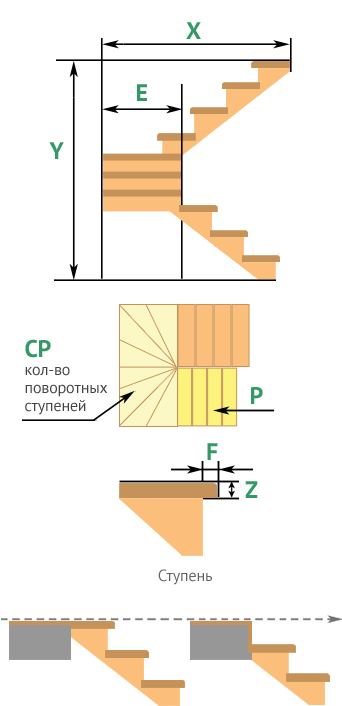
Осталось только рассчитать размер деревянных забежных ступеней. При назначении размера клинообразных забежных ступеней расчетные величины принимают посередине марша. Из практики могу сказать, что в среднем на квадрат идет 3, реже 4 ступени все зависит от конкретного случая. При трех ступенях угол поворота забежных ступеней кратный 30 градусам, при 4 ступенях алгоритм иной. Угол первой ступени 24º, второй 45º, третий 67º и четвертый соответственно 90º.
Угол поворота забежных ступенейКонечно 3 ступени комфортнее нежели 4 так как среднее значение проступи при трех ступенях будут равны 290 — 300 мм, а при четырех 210 — 220 мм. Это видно на рисунке ниже.
Размер ступенейПоследним, но необязательным этапом рекомендуется начертить лестницу в реальном размере на стене в том месте где она будет установлена. Такие действия помогут вам представить конструкцию в пространстве и проверить правильность своих расчетов.
Советы и рекомендации
Перед тем как начать изготовление деревянной лестницы с забежными ступенями своими руками, нужно определиться с породой дерева из которого она будет изготовлена. Самыми распространенными породами для производства являются дуб, ясень, бук, клен и лиственница. Также большой популярностью пользуется сосна, но по сравнению с перечисленными породами она не обладает такой же плотностью, зато значительно дешевле.
Список инструментов, которые могут понадобиться вам для изготовления и установки лестницы:
- дрель
- шуруповерт
- электролобзик
- ручная пила
- молоток
- рубанок
- стаместка
- рулетка
- уровень
- шурупы, саморезы, гвозди и прочие крепления
Лестница с забежными ступенями может быть изготовлена двумя способами: на косоурах или тетивах. Вариант с тетивами более распространенный и простой в монтаже, в случае с косоурами изготовление и установка сложнее, но такая конструкция выглядит более элегантно и красивее.
Монтаж деревянной лестницы происходит поэтапно:
- установка тумбы под забежные ступени и первого марша
- установка и крепление несущей конструкции второго марша
- установка ступеней, следует производить снизу вверх
- установка опор, балясин и столбов
- установка и крепление перил
Итог
В этой статье мы рассмотрели как сделать забежную лестницу и как ее рассчитать. Изготовление деревянной лестницы с забежными ступенями сложный процесс, но если вы обладаете определенными навыками в работе с деревом и достаточными знаниями в геометрии, то это процесс вполне выполнимый собственноручно. Не забывайте о том, что при должном уходе и эксплуатацие деревянная лестница прослужит вам не один год, поэтому проводя расчеты соблюдайте рекомендации изложенные в этой статье, это поможет изготовить ее безопасной, а ходьба по лестнице все эти годы будет приносить вам только удовольствие.
Способы расчета размера забежных ступеней с поворотом на 180 и 90 градусов
Забежные ступени применяются для поворотных лестниц вместо обычных лестничных площадок с целью экономии полезного пространства помещения, а также в том случае, когда нужно сократить длину лестничной клетки.
Такие ступени имеют не параллельные края: внутренняя часть ступени для лестницы меньше внешней.
При ходьбе, в особенности при спуске с лестницы, забежные ступени создают массу неудобств:
- во-первых, при постановке ноги ближе к внутренней части, ее ширина оказывается недостаточной для установки ступни;
- во-вторых, внешний конец сильно расширяется: расстояние между ступенями превышает среднюю длину человеческого шага. Чтобы этого избежать, на повороте лестницы, можно закруглить стенку лестничной клетки: так сократится ширина и длина ступенек.
Чтобы нивелировать их неудобство, нужно правильно высчитать ширину в процессе планирования лестничной конструкции. Данный параметр необходимо рассчитывать графически, в соответствии с общепринятой методикой. Концы поворотных должны расширяться пропорционально ширине прямых ступеней.
Важное правило! Ширина узкого конца поворотных ступеней должна составлять не менее 10 см (на расстоянии 15 см от узкого края).
Замена лестничных площадок забежными ступенями возможна в том случае, когда между параллельными маршами лестницы остается горизонтальное расстояние, составляющее как минимум четверть их ширины.
Расчет ширины забежных ступеней
Алгоритм расчета ширины ступеней забежного на поворотной лестнице с двумя маршами расположенными параллельно, будет выглядеть следующим образом:
- По центру лестничного марша проводится линия a b c или средняя линия движения. Линия bc делит среднюю ступеньку надвое по ширине;
- В соответствии с этой линией, начиная с закругленной вершины, на план наносятся ширины проступей. Спуск по лестнице будет гораздо комфортней, если в расчете останется как можно большее число прямых ступенек;
- На рисунке пунктиром отмечены 3 прямые ступени: 6, 7 и 8. Регулировка ширины проступи начинается с 8 ступеньки: за ней необходимо провести горизонтальную линию DE и соединить на линии движения центр А с делениями 1 и 2;
- Линии прокладываются до пересечения с горизонтальной линией, после чего на линии DE отмечается отрезок 1-2. Повторив несколько раз этот отрезок на линии DE в направлении от D к E, мы получаем точки 3-7;
- От каждой из точек 3-7 проводим линии, соединяя их с точками на линии a b c, и получаем горизонтальную проекцию забежных ступенек левой стороны лестницы. Правая половина рассчитывается аналогичным способом.
 Повторив несколько раз этот отрезок на линии DE в направлении от D к E, мы получаем точки 3-7;
Повторив несколько раз этот отрезок на линии DE в направлении от D к E, мы получаем точки 3-7;Графический расчет нельзя считать идеальным способом вычисления размеров поворотных ступеней. Произведя обрисовку, необходимо проанализировать результат и, если это необходимо, вручную немного подкорректировать размеры.
В некоторых случаях приходится изменять размер концов ступеней: сужать или расширять их. При этом стоит помнить: ширина по линии движения должна быть одинаковой.
Все расчетные данные нужно сверять с реальными размерами. Сумма размеров с одной стороны ступеней на плане не может быть больше или меньше реальных размеров лестницы на рассчитываемом участке.
Программа для расчета лестницы с забежными ступенями: StairDesigner 5.
 08a PRO
08a PROВ любом доме, который имеет больше чем один этаж, лестница это не только необходимость, но и элемент дизайна. Конструкции лестниц с забежными ступенями не только имеют стильный внешний вид, но и позволяют оптимально использовать внутреннее пространство дома. Наиболее важными при их строительстве являются тщательные расчёты всех компонентов, поскольку от этого зависит удобство и безопасность конструкции.
Так выглядит интерфейс программы для проектирования лестниц с забежными ступенямиДля получения наиболее точных расчётов забежных лестниц целесообразно использовать автоматические средства проектирования. Одной из программ, которая поможет смоделировать и рассчитать будущую конструкцию является StairDesigner 5.08a PRO
Вернуться к оглавлениюСодержание материала
Что такое забежные ступени
Забежными называют ступени, выполненные в форме неправильного четырёхугольника, которые используют для оформления поворотов в конструкции лестницы.
Данный вид ступеней применяют в следующих лестничных типах:
- Винтовые или спиральные конструкции.
- С поворотными маршами, в том числе на 90, 180 градусов, либо на любой произвольный угол.
Использование забежных ступеней позволяет создать лестничную конструкцию неповторимого дизайна, а также установить ее в условиях ограниченного пространства.
Название элементов лестницы с забежными ступенямиНередко такое решение применяют для оформления плавного захода на прямой участок подъема с поворотом на 90 градусов.
Принято считать, что забежные ступени более опасны при подъёме и спуске, чем обычные, однако, технологически правильное моделирование и крепление способны обеспечить комфортное и безопасное передвижение.
Как рассчитать размеры
Существует немало методов, которые применяются при расчётах элементов лестниц с забежными ступенями.
Схема с размерами лестницы с забежными ступенямиВ частности, для вычисления размеров лестничных конструкций с поворотом на 90 и 180 градусов можно использовать такие методы:
- пропорций;
- подъёма линий;
- датский и другие.

К сожалению, эти методики не дают идеальной точности при расчётах и применимы не во всех случаях. Оптимальным решением при проектировании нестандартных лестниц является использование специализированной компьютерной программы, которая даёт возможность спроектировать нужный вариант и выполнить подробный расчёт всех элементов конструкции. В этом видео показано как сделать расчет лестницы.
Вернуться к оглавлениюПрограмма для расчёта лестничных проектов StairDesigner 5.08a PRO — основные особенности
StairDesigner 5.08a PRO позиционируется как универсальная программа для проектирования внутренних лестниц в доме, рассчитанная на широкий круг пользователей. Она предоставляет следующие основные возможности при работе с моделью.
- Расчёт моделей, как для дома, так и промышленного назначения;
- Проектирование всех составляющих:
- ступеней;
- тетив;
- косоуров;
- опорных столбов;
- перил и других элементов;
- Выбор материала деталей и его фактуры, например:
- дерево;
- металл;
- мрамор и другие;
- Проектирование любых лестничных типов, в том числе:
Чертеж лестницы с забежными ступенями
- стандартные прямые;
- винтовые или спиральные;
- с поворотными маршами на 90, 180 градусов;
- нестандартные, с произвольными углами поворота;
- другие;
- Допускается создание ступеней нестандартной формы путём импорта векторных кривых из внешних источников;
- Просмотр модели в 3D и 2D;
- Распечатка готового проекта, в том числе:
- спецификаций элементов;
- сводных таблиц по материалам;
- сборочных схем;
- внешнего вида в 3D и 2D;
- чертежей в масштабе 1:1;
- Экспорт модели в формате dxf для дальнейшей интеграции и обработки в других программных продуктах.

StairDesigner 5.08a PRO обладает приятным дизайном и интуитивно понятным интерфейсом, который позволяет работать с проектами пользователям, не имеющим большого опыта компьютерного проектирования.
Некоторым недостатком данного программного продукта можно считать отсутствие русскоязычной версии, однако, это компенсируется логическим построением параметров меню и наглядностью в построении моделей. Вернуться к оглавлению
Некоторые принципы применяемые в программе
Поскольку главным предназначением всех программ для проектирования служит построение моделей на основании исходных пользовательских данных, то в процессе их обработки используются внутренние программные базы данных, расчётные алгоритмы, а также принципы оптимального строительства.
Это позволяет смоделировать и рассчитать лестничную модель, которая может быть реализована в жизни наиболее простым и безопасным способом.
StairDesigner 5.08a PRO также использует набор алгоритмов для расчёта и визуализации. Вот некоторые из них.
Процесс расчета лестницы с забежными ступенями- Использование правила Блонделя, как основного для расчётов. Этот метод считается базовым при расчетах лестничных маршей, параметры которых обеспечивают для человека удобное и безопасное передвижение при подъёме и спуске.
- Встроенные алгоритмы оптимизации формы и положения элементов с учётом безопасности и соответствия основным строительным принципам.
- Функции контроля от ввода заведомо несовместимых данных обеспечивают защиту, как от случайных ошибок, так и от проектирования «невозможных» конструкций.
- Контроль соблюдения строительных норм по распределению нагрузок в зависимости от используемого материала, предложение оптимальных параметров, обеспечивающих это соответствие.
Проект лестницы с забежными ступенями в программе StairDesigner 5.08a PRO
Надо отметить, что, несмотря на значительные встроенные возможности проектирования, предусмотреть все ситуации конкретного строительства, используя только стандартные алгоритмы, практически невозможно. Потому в некоторых случаях расчёты необходимо корректировать в ручном режиме.
Вернуться к оглавлениюПрактические аспекты программного моделирования лестниц с забежными ступенями
Рассмотрим, как применяется программа StairDesigner 5.08a PRO для расчёта лестницы с забежными ступенями. Для начала работы в программе необходимо определиться с исходными данными и пожеланиями, в том числе:
- тип будущего строения, материал изготовления её опор и элементов;
- высота проёма, размеры межэтажных перекрытий и покрытия пола;
- планируемая длина проёма;
- необходимая ширина;
- общее количество ступеней, желательное их количество на поворотных участках и лестничных маршах;
- толщина ступени, материал для её изготовления, размер выступа края;
- углы поворота конструкции;
- перила, их высота и материал изготовления;
- при необходимости размеры между маршевых площадок.
Далее, используя верхнее меню программы, исходные данные заносятся в соответствующие поля основного конструктора. После обработки данных на экран выводятся чертежи металлической лестницы по заданным параметрам. Анализируя полученный результат и меняя исходные данные, корректируя их величину по отдельным позициям, проект лестничной конструкции подводится под оптимальные параметры, как с визуальной точки зрения, так и по установочным характеристикам. Возможен также и противоположный вариант работы в программе. В этом случае изображение, полученное в результате первоначального расчёта, корректируется непосредственно на экране с помощью мыши и клавиатуры.
Готовый проект лестницы составленный в программе StairDesigner 5.08a PROПри достижении нужного результата параметры полученной модели фиксируются программными средствами и используются для формирования общих отчётов по проекту. Надо отметить, что вычисление параметров нестандартных лестничных моделей с применением программы проектирования StairDesigner 5.08a PRO требует внимательности и практики моделирования. Изучение возможностей программы путём составления пробных проектов обеспечит в дальнейшем возможность создания сложных моделей с минимально затраченным временем.
Вернуться к оглавлениюНа что обратить внимание в готовом проекте лестницы
На заключительном этапе подготовки проекта забежной лестницы с применением программы необходимо провести окончательную визуальную проверку всех расчётных показателей, поскольку любая, даже самая совершенная программа не исключает возможных погрешностей. Особое внимание необходимо уделить следующим моментам.
Схема и проект лестницы с забежными ступенями- Форма забежной ступени. Она должна иметь неправильную четырехугольную форму с размером минимальной грани не менее 10 см.
- Какой угол уклона имеет лестничный марш. Лестница считается наиболее удобной для спуска и подъёма, если её угол наклона составляет от 23 до 37 градусов.
- Высота перил. Для обеспечения безопасности при передвижении по лестничному маршу расположение перил должно быть на 90 см от основания, но не более 110 см.
- Ширина ступени без учёта выступа. Это расстояние должно находиться в пределах от 20 до 40 см, оптимальным же считается ширина в 32 см.
- Расстояние между ступенями по высоте. Наиболее комфортным будет передвижение по лестнице, у которой высота поступи будет равна 17 см, допускается разбег этого параметра в пределах от 15 до 32 см.
- Точки стыковок элементов конструкции. Их конфигурация должна обеспечивать надёжное крепление элементов между собой.
Только после тщательного просмотра проект лестничной конструкции может быть использован для строительства.
Таким образом, установка забежной лестницы будет способствовать созданию неповторимого дизайна и позволит оптимально спланировать внутреннее пространство в доме.
А использование программы для расчёта подобной лестницы обеспечит визуальное представление будущей конструкции и идеальную точность расчётов, что будет залогом надёжности и безопасности воплощённого замысла.
Рассчитайте размеры вашей лестницы в четверть оборота
Расстояние по вертикали между нижним и верхним этажами.
Полезная ширина лестницы.
Ширина лестницы должна быть больше, а ее идеальное значение должно быть больше или равно 800 мм (32 дюйма).
Расстояния между центром забежных ступенек и прямыми ступенями.
Позволяет увеличить размер короткой кромки и ход ступенек намотки.
Количество ступенек, составляющих лестницу. Верхний этаж считается ступенькой.
Количество ступеней в первом пролете.
Количество ступеней под углом.
Количество ступеней во втором пролете.
Расстояние по горизонтали между двумя ступенчатыми выступами.
Шаг должен составлять от 230 до 330 мм (от 9 до 13 дюймов).
Идеальное значение — 280 мм (11 дюймов).
Расстояние по горизонтали между носком первой ступени и углом лестничной клетки.
Расстояние по горизонтали между верхним этажом и углом лестничной клетки.
Расстояние от потолка до прохода у лестничной клетки.
Высота должна быть больше 1900 мм (75 дюймов), а ее идеальное значение больше или равно 2100 мм (83 дюйма).
Проем на уровне верхнего этажа с первым пролетом, к которому ведет лестница.
Проем на уровне верхнего этажа со вторым пролетом, по которому проходит лестница.
Толщина плиты подъезда.
G + 2H = от 590 до 650 мм
G + 2H = от 23,2 до 25,6 дюймов
G: по ходу
H: Высота ступеньки
Формула, созданная французским архитектором Франсуа Блонделем (1618-1686), проверяет соответствие между высотой ступеньки и ходом.
идеальное значение — 630 мм (24,8 дюйма).
Расстояние по вертикали между двумя ступенями.
Высота ступеньки должна составлять от 150 до 200 мм (от 6 до 8 дюймов).
Идеальное значение — 175 мм (7 дюймов).
Постройте лестницу с забежными ступенями для площадок
Узнайте, как построить лестницу с забежными ступенями для площадок, с помощью этих бесплатных инструкций для самостоятельной сборки. Изучите требования IRC 2012 от начала до конца. Коды основаны на информации, взятой со страницы 89 Международного жилищного кодекса 2012 года.
Первым делом нужно рассчитать подступенки.Сделайте это с помощью шагового калькулятора, чтобы ввести общий рост. Это вертикальное измерение от верха готового пола на начальном уровне до верха готового пола на конечном уровне. Калькулятор автоматически вернет индивидуальный подступенок и количество ступенек.
Составьте точную планировку пола на основе количества шагов, возвращаемых калькулятором, и информации в следующем абзаце. Верхняя ступень не обязательно должна совпадать с конечным уровнем; он может упасть на ступеньку ниже.Забежные ступени — это три ступеньки, которые поворачивают направление движения на 90 °. Из-за характера требований норм, которые их регулируют, необходимо иметь плоское пятно под углом 45 ° и длиной 6 дюймов на внутренней части стыка двух стен. Без этого невозможно добиться соответствия строительным нормам. Так что если стены уже были обрамлены, то их необходимо переделать. Это не так уж сложно и займет не более 30 минут.
Одна из самых сложных задач при обрамлении винтовой лестницы — подобрать ее по размеру, сохранив высоту и удовлетворяя другие требования плана этажа.Часто чертежи рисуются с 9-дюймовыми пролетами и 8-дюймовыми стенами. Когда реальное приложение должно иметь минимум 10 дюймов или стены были подняты, может быть почти невозможно заставить работать лестницу, не увеличивая для нее пространство. Это не может помешать ни одному критическому измерению, например, пространству для туалета или размеру холла.
Когда компоновка будет удовлетворительной, найдите высоту каждого подъемника, используя секцию приземления нашего калькулятора. Результаты выдаются автоматически, поэтому запишите каждый из них на ближайшем элементе кадрирования.
Сначала соберите нижнюю намоточную машину. Он должен быть такого же размера, как занимаемая площадь для всех намоточных устройств вместе взятых. Постройте каркас размером 2 x 10, как если бы это был миниатюрный пол. Используйте AdvanTech для настила. Убедитесь, что верхняя часть готового пола для каждого забежного устройства соответствует индивидуальному подступенку, сгенерированному калькулятором.
Соберите ступеньки, соединяющие нижнюю забежную головку с полом. Перед тем, как что-либо прибивать гвоздями, проверьте расположение стрингера. Не забывайте делать поправки на разные напольные покрытия и основы.Обычно это означает снятие лишних 1/4 дюйма нижней части стрингера, чтобы обеспечить разницу между ступеньками в 1 дюйм. В любом случае будет проверяться готовая поверхность для ходьбы.
Постройте следующие две намотки, разорвав 2 x 10 до размера, равного отдельным подступенкам минус 3/4 дюйма (AdvanTech). Другими словами, если рассчитанный индивидуальный подступенок составляет 7 1/2 дюймов, то разорвите элементы каркаса для следующих двух намоточных устройств до 6 3/4 дюйма. Точно следуйте схеме, сделанной на полу.
Постройте набор верхней ступеньки, соединяющей верхнюю забежную головку с конечным уровнем. Как и нижний набор ступеней, три стрингера выкладываются по общему шаблону после того, как он был протестирован на соответствие требованиям к стояку и проходу. Если готовые ступени будут из твердой древесины, то используйте временные, приколоченные, ровно настолько, чтобы они оставались неподвижными.
Минимальная готовая ширина лестницы должна составлять 36 дюймов. Это измерение производится над поручнем и под высотой потолка. Для наших целей убедитесь, что между каркасными стенами есть минимум 37 дюймов.
Ни при каких условиях высота не может опуститься ниже 6 футов 8 дюймов. Это вертикальное измерение от наклонной линии вдоль носовой части ступеней до потолка. Исключение позволяет полу выступать горизонтально в высоту потолка максимум на 4 1/2 дюйма, но я рекомендую никогда этого не делать, если в этом нет крайней необходимости.
Ступени лебедки должны иметь ширину не менее 6 дюймов в самом узком месте. Они также должны выдерживать расстояние 10 дюймов на линии шага 12 дюймов, измеряя изнутри наружу.
Что можно и нельзя
- Никогда не доверяйте планировке, не проверив стрингер, лебедки и все остальное.
- Используйте гвозди размером не менее 3 ″ x 0,120 ″.
- Не приклеивать временные ступени.
- Все остальное склеить строительным клеем.
- Используйте обработанные давлением плиты внизу самых нижних стрингеров, если они опираются на бетон.
- Обязательно оставьте гипсокартон, прикрепив 2 x 4 к внешнему краю стрингеров.
- Используйте пиломатериалы хорошего качества на протяжении всего процесса создания каркаса.
Как сделать или построить лестницу в форме забежных ступеней — бесплатный калькулятор лестницы
Рисунок 1 — Лестница в форме забежной ступени
Если вам требуется лестница в форме буквы «L», но вы сталкиваетесь с препятствиями, такими как коридоры и стены, лестница «забежная», как показано на рисунке 1, может быть лучшим решением.
Винтовая лестница может значительно сэкономить пространство по сравнению с лестницей в стиле буквы «L». На рисунке 2 вы можете видеть, что для L-лестницы потребуется 56 дюймов в ширину, а лестница в стиле забежных ступеней обеспечит ту же функцию на ширине верхней части лестницы — 36 дюймов. Экономия 20 дюймов.
Рисунок 2 — Сравнение ширины — L-образная лестница и лестница в стиле забежной
Примечание 1: Лестницы типа Winder определенно не так безопасны, как прямые или L-образные лестницы.Это связано с тем, что лестница меняет размеры при подъеме и спуске. Было обнаружено, что изменение размеров лестницы в пределах одной лестницы является основной причиной спотыкания, падения и других несчастных случаев.
Примечание 2: Строительные отделы придерживаются различных взглядов, правил и положений в отношении лестниц в стиле забежных ступеней. Некоторые строительные нормы и правила никоим образом не разрешают их строительство. Другие не позволяют забежным лестницам подходить к точке, в то время как третьи требуют глубины ступени 10 дюймов вдоль «линии движения» (обычно определяемой как линия, идущая на 12 дюймов от узкого края ступеней лестницы).Очень важно проконсультироваться с местным строительным отделом, прежде чем вкладывать деньги в строительство забежной лестницы, иначе вам может понадобиться снести ее.
Если после прочтения примечаний выше и согласования с вашим строительным отделом вы все же хотите продолжить строительство лестницы в стиле «забежной», следуйте инструкциям по созданию трехступенчатой забежной лестницы. Эта информация предполагает, что вы прочитали начальные страницы по расчету общего подъема, подъема по лестнице и пробега по лестнице, поскольку забежная лестница начинается с тех же основных расчетов.
Рисунок 3 — Расчет и строительство первой площадки (ступеньки) забежной лестницы
Продолжение …….
Прямая лестница
Часть 1а
Часть 1b
Часть 2a
Часть 2b
«Л» Лестница «
Часть 3
Часть 4
Забежная лестница
Часть 5
Часть 6a
Часть 6b
Терминология лестницы
Ремонт лестниц
Ремонт или замена ступеней лестницы
Механизмы намотки и разматывания с центральным приводом
Предыдущий «Поверхностные приводные валки и приемные устройства» • Вернуться к указателю • Следующий «Контроль натяжения зоны»
Подвижные и разматыватели с центральным приводом
1.) Общие характеристики:
Пожилые люди из нас знакомы с кассетами и, возможно, даже с катушечными магнитофонами. В обоих этих устройствах использовались намотчик и разматыватель с центральным приводом, а между ними был установлен привод с постоянной скоростью. Намоточная или приемная бобина запускалась с высокой скоростью из-за своего малого диаметра и замедлялась по мере увеличения диаметра. Разматыватель или подающая катушка, конечно, начинали полный / медленный и заканчивали маленьким / быстрым. Эта операция оказалась очень простой.Лента для записи относительно прочная и требует небольшого контроля натяжения.
В промышленных центрах намотки / размотки рулонный материал может не допускать значительных изменений натяжения, хотя при транспортировке материала с постоянным натяжением скорость и крутящий момент двигателя должны изменяться, чтобы поддерживать постоянное натяжение и поверхностную скорость. См. Кривые скорость / крутящий момент и диаграмму на рисунке H.1.
Эта информация показывает, что для намоточных и разматывающих устройств Velocity (прием и выпуск) двигатель намоточного устройства и скорость валка нелинейны по отношению к диаметру и крутящему моменту валка.Эта кривая гиперболической формы создает много путаницы. Верно, что при увеличении диаметра 10: 1 валок диаметром 10% будет работать со скоростью 100%, валок диаметром 100% будет работать со скоростью 10%. Поэтому, естественно, рулон диаметром 50% будет работать со скоростью 50% — НЕ !!!! Попытка обеспечить линейное управление скоростью между началом и концом процесса сборки рулона застала многих разработчиков намоточных машин.
Еще одна сложность, связанная с валками с центральным приводом, связана с диапазоном «уменьшения скорости линии».Если линия сначала работает на скорости 10%, а затем увеличивается до 100%, это соответствует диапазону уменьшения от 10 до 1. Подъемная машина с центральным приводом с диапазоном построения 10: 1 на линии с диапазоном поворота 10: 1 должна работать в диапазоне скоростей 100: 1!
Эту эталонную кривую скорости намотки можно легко получить, разделив «линейную» скорость полотна на диаметр рулона намотки. У Carotron есть несколько интерфейсных продуктов, которые могут делать именно это. Мы предлагаем модели управления намотчиками и разматывателями для людей, которые ненавидят компьютеры, и устройства управления для людей, которые ненавидят потенциометры, и даже устройства для людей, которым не нравится и то, и другое !!!!
ПРИМЕНИМЫЕ ТОВАРЫ
D10337-000 КОНТРОЛЬ ЦЕНТРАЛЬНОГО ВЕТРА ПОСТОЯННОГО НАПРЯЖЕНИЯ (CTCW)
CLT2000-000 КОНТРОЛЛЕР CORTEX LT
MM3000-CTCW МИКРОМАНАДЖЕР CTCW CONTROL
История меняется для мотальных машин Torque с центральной намоткой.В общем, режим Torque Mode подходит, когда полотно обрабатывается с конечным уровнем натяжения (в отличие от режима без натяжения). Для регулятора с постоянным натяжением «момент установки натяжения» полотна, передаваемый двигателем намотки, должен увеличиваться прямо пропорционально диаметру рулона. Это очень линейная зависимость.
Одна проблема со всем этим заключается в том, что некоторые материалы не могут быть намотаны в красивые плотные пакеты с прямыми краями и постоянной шириной — при сохранении натяжения постоянным !!! Проблема проявляется в виде деформации готового рулона.Одно явление, называемое телескопированием , заставляет одну сторону рулона иметь выпуклую форму, а другую сторону — вогнутую. Другая проблема, называемая «коркой» или «апельсиновой коркой», проявляется как искажение вблизи сердцевины рулона в виде волн или складок.
Эти проблемы можно предотвратить, намотав профиль TAPER TENSION . Здесь натяжение начинается с самого высокого уровня и уменьшается или уменьшается по мере уменьшения диаметра. Иногда наилучшие результаты достигаются, когда рулон сначала наматывается с постоянным натяжением, а затем сужается по диаметру.
2.) Механические аспекты:
Несмотря на то, что существует множество проблем, связанных с методом контроля натяжения, столько же проблем связано со способностью электромеханических частей системы постоянно обеспечивать надлежащую скорость вращения и крутящий момент, необходимые для желаемого натяжения.
A.) Диапазон скоростей
Нагрев двигателя Winder является одним из важных факторов. Поскольку скорость двигателя намотки будет уменьшаться по мере увеличения диаметра рулона, намоточные машины работают на минимальных оборотах с максимальным требуемым крутящим моментом.Их двигатели могут быть ограничены их «диапазоном скоростей ».
Диапазон скорости относится к отношению номинальной базовой скорости к самой низкой скорости, на которой двигатель может работать непрерывно при полной нагрузке — без перегрева. Типичный диапазон полной скорости вращения для двигателей постоянного тока мощностью <5 л.с. составляет 20: 1. Это означает, что двигатель может непрерывно работать на 1/20 базовой скорости с полным крутящим моментом без перегрева. Двигатели постоянного тока мощностью более 5 л.с. обычно имеют диапазон скорости / крутящего момента примерно 2: 1, если не добавлено дополнительное охлаждение.Вентиляторное охлаждение обычно расширяет диапазон до 10: 1.
Стандартные асинхронные двигатели переменного тока, работающие в неинверторном режиме, не предназначены для применений с «регулируемой скоростью» и могут испытывать проблемы из-за ограничения диапазона скорости и пробоя изоляции. Двигатели с номинальным режимом работы инвертора могут иметь диапазон скоростей 1000: 1, а двигатели с режимом работы Vector хороши для достижения полного номинального крутящего момента при «0» об / мин. Эти характеристики могут меняться в зависимости от типа двигателя и производителя; убедитесь, что выбранный двигатель соответствует реальным рабочим требованиям.
B.) Размер двигателя и зубчатой передачи
Также критически важным для правильного контроля натяжения с центральными намоточными машинами является размер двигателя и редуктора . При использовании схемы управления, которая включает управление крутящим моментом (например, управление крутящим моментом, управление крутящим моментом / конусом, управление CTCW и т. Д.), Крутящий момент, необходимый для натяжения полотна, должен составлять основную часть общего крутящего момента, передаваемого на вал двигателя.
Натяжение с управлением крутящим моментом использует сигнал обратной связи по нагрузке двигателя / привода для определения величины прилагаемого крутящего момента.Когда крутящий момент, необходимый для приведения в действие механических компонентов намоточного устройства, велик по сравнению с крутящим моментом, необходимым для надлежащего натяжения полотна, это затрудняет достижение хорошего разрешения управления.
ПРИМЕР: Разрешение крутящего момента сложнее в старых намоточных машинах, которые были повторно настроены для работы с более легким продуктом натяжения. Из-за больших механических компонентов и связанных с ними инерционных и фрикционных нагрузок крутящего момента может потребоваться относительно высокий «отрывной» крутящий момент для начала вращения намоточного устройства.Проблема возникает из-за того, что после запуска крутящий момент отрыва больше не требуется для поддержания движения, и, если он не устранен, крутящий момент теперь передается полотну в виде слишком большого «момента установки натяжения». Компенсация «ИМПУЛЬСНЫЙ МОМЕНТ» для этого состояния предусмотрена в нескольких контроллерах Carotron.
Итак, внимательно изучите требования к крутящему моменту для механики в дополнение к натяжению полотна. При намотке с использованием режима управления МОМЕНТ, позаботьтесь о том, чтобы намотчик был настроен на достаточный крутящий момент , но не превышающий , чтобы обеспечить желаемое натяжение полотна и компенсировать механические требования.
Зубчатые передачи для лебедки с центральным приводом с регулируемой скоростью являются более стандартными. Избыточный запас крутящего момента может быть плюсом для дополнительной реакции во время ускорения.
Цепи управления для намоточных и разматывающих машин с центральным приводом иногда считают волшебством. Существуют различные техники и методы контроля. Сложность состоит в том, чтобы определить, что лучше всего подходит для данного приложения. Мы рассмотрим следующие типы схем управления и укажем на некоторые особенности, преимущества и ограничения каждой, чтобы попытаться упростить процесс выбора.В общем, список начинается с более простых схем и усложняется по мере того, как список продолжается.
C.) Требование удержания
Еще одно важное соображение, связанное с подмоточными машинами с центральным приводом, касается того, как должно развиваться натяжение. Намотчик передает натяжение полотну за счет приложения тягового усилия между намоточным устройством и точкой удержания на пути полотна. «Сдерживающая» сила должна быть больше, чем тянущая сила установки натяжения, оказываемая намоточным устройством, в противном случае желаемое натяжение не может контролироваться или даже достигаться.
Удерживающий или тормозной момент может быть обеспечен процессами, происходящими в полотне. Такие процессы, как продольная резка, печать, нанесение покрытия, сушка и т. Д., Могут обеспечить адекватную фрикционную нагрузку или сдерживание. В некоторых случаях прижим должен обеспечиваться приводными роликами, такими как ролики NIP или ролики S-Wrap , которые надежно захватывают материал. Когда момент установки натяжения, создаваемый намоточной машиной, превышает тормозной момент, обеспечиваемый технологическими процессами или приводными валками, намоточная машина может « перетянуть» их и вытащить полотно на более высокую неконтролируемую скорость с меньшим, чем желаемое натяжение.
В этом случае необходимо использовать регенеративный контроллер для управления S-образной обмоткой, прижимным роликом или приводным двигателем процесса. Привод « Regen» может функционально преобразовывать двигатель в генератор, который использует линию переменного тока или с инверторными приводами, тормозной резистор, в качестве нагрузки для создания удерживающего крутящего момента. Обратитесь к разделу «D.5» для обсуждения регенерации.
ПРИМЕНИМЫЕ ТОВАРЫ
D10425-000 ПРИВОД РЕГЕНЕРАЦИИ ПОСТОЯННОГО ТОКА СЕРИИ OEM
RCP200 DC РЕГЕН СЕРИИ
BRC700 BLAZER IV DC REGEN СЕРИИ
TRC600 TROOPER IV DC REGEN СЕРИИ
ELITE E12 DC REGEN СЕРИИ
ELITE PRO EPR DC REGEN СЕРИИ
ПРИВОДЫ ПЕРЕМЕННОГО ТОКА С МОДУЛЕМ РЕГЕНЕРАЦИИ НА ЛИНИИ
3.) Контроль постоянного крутящего момента
При управлении постоянным крутящим моментом опорный сигнал крутящего момента намоточной машины обычно устанавливается вручную на фиксированный уровень. Обратитесь к разделу «C» для обсуждения типов приводов и двигателей, а также методов управления. Контроль постоянного крутящего момента может быть эффективным методом управления лебедкой с центральным приводом, если существует большинство из следующих условий:
— Контроль натяжения полотна не очень критичен. Полотно может выдерживать широкий диапазон натяжения без повреждений.
— Изменение диаметра небольшое, обычно 3: 1 или меньше.
— Оператор может регулировать крутящий момент для различных материалов или при изменении диаметра.
— Линейная скорость и скорость ускорения низкая.
— Работа в обратном направлении не требуется
Помните, однако, что контролируется крутящий момент двигателя, а не скорость. Если полотно не подсоединено или прерывается в работе, скорость намотки может быть неконтролируемой, что может привести к превышению нормальной скорости двигателя.Доступны различные методы защиты, обнаружение разрыва полотна и ограничение скорости, которые могут потребоваться для безопасного ограничения скорости и / или отключения.
На рисунке H.2 показаны типичные кривые скорость / крутящий момент для управления постоянным крутящим моментом. Обратите внимание, что скорость очень быстро падает с увеличением крутящего момента. Это очень похоже на работу привода со стандартным скоростным режимом, когда уровень тока / крутящего момента двигателя превышает заданное значение «ограничения тока». Пунктирные линии обозначают семейство кривых, полученных с увеличенными уставками крутящего момента.На рисунке H.3 показана типовая схема машины для мотальной машины с центральным приводом и постоянным контролем крутящего момента.
Как видите, центральные намоточные машины с постоянным крутящим моментом просты и экономичны с небольшим количеством дополнительных деталей к базовому приводу и двигателю. Большинство контроллеров двигателей постоянного тока Carotron можно использовать в качестве контроллеров крутящего момента.
ПРИМЕНИМЫЕ ТОВАРЫ
ПРИВОДЫ ПОСТОЯННОГО ТОКА СЕРИИ ADP100
ПРИВОДЫ ПОСТОЯННОГО ТОКАСЕРИИ TDP500
ПРИВОДЫ ПОСТОЯННОГО ТОКАСЕРИИ CDC300
ПРИВОДЫ ПОСТОЯННОГО ТОКА СЕРИИ ELITE E06
ПРИВОДЫ ПОСТОЯННОГО ТОКА СЕРИИ ELITE PRO EPN
4.) Контроль крутящего момента / конуса
Управление крутящим моментом / конусом намоточной машины с центральным приводом — это усовершенствование управления натяжением по сравнению со схемой управления постоянным крутящим моментом, описанной ранее. При управлении крутящим моментом / конусом привод постоянного тока действует как регулятор скорости с коррекцией крутящего момента нагрузки над скоростью. Этот метод управления прост и экономичен, поскольку для двигателя постоянного тока ток якоря является точным представлением уровня нагрузки (крутящего момента) двигателя.
См. Рисунок H.4. Здесь мы показываем кривую зависимости скорости от крутящего момента в гиперболической форме «идеального постоянного напряжения» и семейство кривых для центральной намоточной машины с регулируемым крутящим моментом / конусностью. Обратите внимание, что кривая крутящего момента / конусности, хотя и довольно прямая, близко приближается к первой части (с диапазоном построения примерно 2,5: 1) кривой постоянного натяжения. Таким образом, для центральных намоточных машин с ограниченным изменением диаметра с режимом крутящего момента этот метод управления может обеспечить довольно постоянное натяжение, а затем конусное натяжение за пределами диапазона 2,5: 1. Это подходит для многих приложений намотки с ограниченным диапазоном.
Максимальная скорость двигателя регулируется в соответствии с максимальной поверхностной скоростью ненагруженного сердечника. Эта настройка должна превышать максимальную скорость подачи материала на несколько процентов, чтобы обеспечить развитие натяжения и действовать как ограничение числа оборотов двигателя в случае поломки полотна.
Затем настройка TORQUE устанавливает уровень нагрузки крутящего момента двигателя, при котором возрастающая обратная связь по крутящему моменту (ток якоря) начинает вычитаться из задания скорости. Об этом свидетельствует включение светодиода.Продолжающееся увеличение тока якоря по мере увеличения диаметра валка приведет к дальнейшему снижению скорости. Потенциометр TAPER , по сути, представляет собой настройку для усиления , которая контролирует крутизну или скорость уменьшения скорости в зависимости от увеличения нагрузки / диаметра. Обычно МОМЕНТ устанавливается на натяжение сердечника, а регулировка конуса — на полное натяжение пакета.
Когда TAPER установлен на минимальное, полное вращение против часовой стрелки, работа привода очень похожа на обычное управление скоростью, когда, когда момент нагрузки (ток) достигает и начинает проходить заданное значение CURRENT LIMIT, скорость очень резко падает до уровня остановки.Увеличение настройки TAPER позволяет менять скорость на крутящий момент, как описано выше — ток может увеличиваться, но только при уменьшении скорости.
Следует проявлять осторожность при выборе размеров двигателя и привода, чтобы достичь баланса в следующем:
1. Двигатель и привод не перегружаются длительное время и
2. Двигатель и привод не имеют завышенных размеров, поэтому обеспечивается наилучшее разрешение управления крутящим моментом. Ключевым фактом здесь является то, что этот метод управления зависит от значительного изменения нагрузки двигателя с увеличением диаметра, чтобы обеспечить наилучшие результаты.
Крутящий момент / конусность — очень экономичный способ получить хороший контроль натяжения при изменении диаметра 2: 1. В этом диапазоне натяжение можно отрегулировать так, чтобы оно оставалось практически постоянным без дополнительной регулировки. Лучше всего работать на медленных линейных скоростях и малых скоростях разгона / торможения, так что дополнительные требования к крутящему моменту сведены к минимуму. При использовании управления крутящим моментом / конусом также следует избегать работы в обратном направлении линии.
На рисунке H.5 показана типовая схема машины с использованием управления крутящим моментом / конусом.Также показан дополнительный повторитель скорости для управления крутящим моментом / конусом для отслеживания линейной скорости. Крутящий момент / конусность — стандартная функция серии Blazer BDP400 и предлагается в качестве опции в сериях ADP100 и Trooper.
ПРИМЕНИМЫЕ ТОВАРЫ
ПРИВОДЫ ПОСТОЯННОГО ТОКА СЕРИИ ADP100
ПРИВОДЫ ПОСТОЯННОГО ТОКАСЕРИИ TDP500
ПРИВОДЫ ПОСТОЯННОГО ТОКА СЕРИИ BDP400
5.) Контроль натяжения в режиме крутящего момента с компенсацией диаметра
Можно улучшить системы контроля крутящего момента или крутящего момента / конусности, добавив компенсацию диаметра для регулировки крутящего момента намоточного устройства по мере увеличения диаметра.Для постоянного натяжения полотна это означает, что по мере увеличения диаметра крутящий момент намоточного устройства должен пропорционально увеличиваться. Когда диаметр увеличивается вдвое, крутящий момент должен удвоиться. Натяжение полотна центральной намоточной машины рассчитывается следующим образом:
| Натяжение полотна = | (крутящий момент намотки) (диаметр рулона / 2) |
Компенсация диаметра может быть получена с помощью устройства прямого измерения, такого как Carotron Sonictrac® или Sonictrac® Pro, ультразвуковое устройство измерения расстояния, как показано на рисунке H.6, или простой потенциометр, подключенный к руке гонщика, касающейся поверхности валка. С устройством Sonictrac® выход масштабируется, чтобы указать на увеличение диаметра. Например: при увеличении диаметра 5: 1 от 6 дюймов до максимального диаметра 30 дюймов, вы можете настроить Sonictrac® на увеличение сигнала 5: 1 с 2 В постоянного тока до 10 В постоянного тока. Регулирующий потенциометр на выходе устройства Sonictrac® можно использовать для регулировки натяжения при намотке различных материалов.
ПРИМЕНИМЫЕ ТОВАРЫ
D10337-000 КОНТРОЛЬ ЦЕНТРАЛЬНОГО ВЕТРА ПОСТОЯННОГО НАПРЯЖЕНИЯ (CTCW)
CLT2000-000 КОНТРОЛЛЕР CORTEX LT
MM3000-CTCW МИКРОМАНАДЖЕР CTCW CONTROL
MM3000 — ЦЕНТР МИКРОМАНАДЖЕРА CRG РЕФЕРЕНС-ГЕНЕРАТОР
УЛЬТРАЗВУКОВЫЙ ДАТЧИК СЕРИИ SMU100
STP200-000 SONICTRAC PRO
Если диаметр невозможно измерить удобным образом, существуют альтернативные методы компенсации диаметра с помощью вычислений.
Помните рисунок H.1, зависимость скорости намотки от крутящего момента? Эта же кривая снова показана на Рисунке H.7 ниже, где крутящий момент намотки заменен диаметром намотки. Когда крутящий момент центрального намоточного устройства регулируется и ограничивается таким образом, чтобы не происходило проскальзывания или растяжения полотна, скорость двигателя намоточного устройства будет следовать кривой, как показано.
Эта характеристика позволяет нам взять сигнал линейной (поверхностной) скорости и разделить на измеренный сигнал скорости двигателя намоточного устройства для расчета диаметра ролика намоточного устройства и требуемого крутящего момента.Carotron предлагает несколько продуктов, которые выполняют такой расчет диаметра. Некоторые включают «память» для сохранения рассчитанного уровня диаметра при остановке лески. Это позволяет поддерживать желаемое натяжение при «остановке» и может помочь при быстром ускорении частично «построенных» валков.
ПРИМЕНИМЫЕ ТОВАРЫ
D10337-000 КОНТРОЛЬ ЦЕНТРАЛЬНОГО ВЕТРА ПОСТОЯННОГО НАПРЯЖЕНИЯ (CTCW)
CLT2000-000 КОНТРОЛЛЕР CORTEX LT
MM3000-CTCW МИКРОМАНАДЖЕР CTCW CONTROL
MM3000 — ЦЕНТР МИКРОМАНАДЖЕРА CRG РЕФЕРЕНС-ГЕНЕРАТОР
D11005-000 КАРТА МУЛЬТИПЛИКАТОР / РАЗДЕЛИТЕЛЬ
STP200-000 SONICTRAC PRO
Два других метода расчета диаметра доступны от Carotron и требуют знания толщины наматываемого материала и использования энкодера или генератора импульсов и функции счета.
Первый, оборот ролика, метод подсчитывает импульсы энкодера для измерения каждого оборота или поворота приемного ролика. Каждый оборот добавляет к диаметру две толщины материала.
Второй, оборот линии, , метод подсчитывает обороты приводного ролика материала (или ролика, приводимого в движение материалом). Если исходить из сердечника известного диаметра и измерения массы материала по счету оборотов линии, расчет «спирали» даст диаметр приемного валка.
Хотя это значительное улучшение по сравнению с постоянным крутящим моментом или контролем крутящего момента / конусности, компенсация диаметра сама по себе все еще имеет недостатки в обеспечении ускорения и статического момента, компенсирующего трение при движении. Следует проявлять осторожность при применении его для медленных и ускоряющихся процессов.
ПРИМЕНИМЫЕ ТОВАРЫ
CLT2000-000 КОНТРОЛЛЕР CORTEX LT
MM3000-CTCW МИКРОМАНАДЖЕР CTCW CONTROL
MM3000 — ЦЕНТР МИКРОМАНАДЖЕРА CRG РЕФЕРЕНС-ГЕНЕРАТОР
6.) Центральная намоточная машина с постоянным натяжением в режиме крутящего момента (CTCW)
Управление постоянным натяжением центрального ветра (CTCW) — один из наиболее экономически эффективных способов управления натяжением в режиме крутящего момента на мотальных машинах с центральным приводом. Основное преимущество заключается в управлении «разомкнутым контуром», т.е. не требуются устройства или механизмы обратной связи по натяжению, такие как датчики веса или балансира.
Как показано на рис. H.8, CTCW Controls компании Carotron предоставляют полную справочную информацию о приводе в режиме крутящего момента для регулирования натяжения полотна.Следующие компоненты сигнала доступны как часть общего задания крутящего момента:
Крутящий момент на основе диаметра , от внешнего источника или расчетным путем обеспечивает эталонный крутящий момент, необходимый для поддержания постоянного натяжения по мере того, как пакет роликов достигает максимального диаметра. При вычислении диаметра с использованием скорости двигателя намотки схема памяти может хранить информацию о диаметре до сброса, так что остановка и перезапуск частично построенного валка возможны с ограниченными возмущениями натяжения.
A WK — Квадрат , компенсация инерции, контур увеличивает крутящий момент намотки во время ускорения линии, чтобы поддерживать постоянное натяжение полотна.
Цепи компенсации тренияStatic и Dynamic учитывают трение в механизме намотки при остановке работы, запуске и в результате увеличения линейной скорости.
Импульсный крутящий момент может обеспечить управляемый «толчок», чтобы сломать механику механизма намотки увеличенного размера.
A Коническая цепь может обеспечивать сужающееся напряжение по мере увеличения диаметра, чтобы уменьшить вероятность повреждения продукта из-за деформации валков и / или телескопирования.
A Jog control Схема обеспечивает постоянное управление скоростью привода в режиме крутящего момента при заправке намотки.
На рисунке H.7 показаны характеристики скорости / крутящего момента, которые могут быть получены с помощью схемы управления CTCW. Основная кривая показывает характеристику, необходимую для постоянного натяжения.На диаграмме показаны относительные значения скорости намоточного устройства, крутящего момента и диаметра намоточного вала. Пунктирная линия показывает уменьшение крутящего момента, определяемое профилем натяжения конуса.
ПРИМЕНИМЫЕ ТОВАРЫ
D10337-000 КОНТРОЛЬ ЦЕНТРАЛЬНОГО ВЕТРА ПОСТОЯННОГО НАПРЯЖЕНИЯ (CTCW)
CLT2000-000 КОНТРОЛЛЕР CORTEX LT
MM3000-CTCW МИКРОМАНАДЖЕР CTCW CONTROL
ПРИВОД ЭЛИТ ПРО DC СЕРИИ
7.) Револьверные моталки с режимом крутящего момента / скорости
См. Рисунок H.9. Здесь мы проиллюстрируем устройство двойной намотки, где две отдельные намоточные машины установлены на вращающемся револьверном механизме. Эта компоновка механически позволяет перемещать непрерывно подаваемое полотно с полного рулона на одном намоточном устройстве на пустой сердечник на другом без остановки полотна и без значительных изменений натяжения. Этот «процесс переноса на лету» известен как «перемещение на лету» или «соединение на лету», когда он происходит на разматываемом конце линии.
Основная трудность процесса переноса связана с мгновенной разницей скоростей двух намоточных машин из-за разницы в диаметре валков во время переноса материала.Использование одного привода и двигателя для обоих намотчиков возможно, но очень сложно и требует механизма хранения полотна, который будет накапливать излишки полотна, пока двигатель разгоняется от скорости «полного рулона» до скорости «пустого сердечника». Например, изменение диаметра 10: 1 или «диапазон построения» означает, что для постоянной скорости линии частота вращения двигателя намотки при диаметре сердечника будет в 10 раз выше, чем скорость двигателя полного вала.
Лучшие результаты достигаются при независимом управлении отдельными намоточными машинами — каждая со своим собственным двигателем, приводом и схемой управления.Это дает «фору» в ответ за счет предварительного запуска нового ядра и установки его скорости на несколько процентов выше скорости линии. Затем, когда материал переносится, сердечник опускается до линейной скорости полотном. Нагрузка крутящего момента на намотчик обычно увеличивается с увеличением диаметра, но напряжение регулируется эталонным профилем крутящего момента, обеспечиваемым схемой управления типа CTCW (постоянное натяжение центрального ветра).
Ключом к описанной выше схеме является управление скоростью , и крутящим моментом каждой намоточной машины.Изначально управление скоростью используется для установки скорости ядра на несколько процентов выше скорости линии. Энкодеры могут использоваться для измерения линейной скорости и скорости двигателя моталки вместо тахометров. Затем используется регулирование крутящего момента для обеспечения контроля натяжения разомкнутого контура при увеличении диаметра.
Carotron предлагает как инверторы переменного тока Vector, так и приводы постоянного тока, которые включают возможность управления крутящим моментом при ограничении или регулировании скорости.
ПРИМЕНИМЫЕ ТОВАРЫ
CLT2000-000 КОНТРОЛЛЕР CORTEX LT
ПРИВОД ЭЛИТНОГО ПОСТОЯННОГО ТОКА СЕРИИ
ПРИВОД ЭЛИТ ПРО DC СЕРИИ
ПРИВОДЫ ПРЕОБРАЗОВАТЕЛЯ ВЕКТОРНОГО ТИПА FLUX
8.) Подъемники револьверной головки только для скоростного режима
Приложение револьверной намотки также может быть реализовано с использованием приводов «только в режиме скорости». Управление натяжением полотна в режиме скорости обычно требует добавления компенсатора или петли обратной связи весоизмерительной ячейки для регулирования натяжения. Требуется специальная логика последовательности для согласования скоростей и «замораживания» сигналов управления во время передачи.
При управлении танцором, операция натяжения конуса может быть достигнута только с добавлением пневматического привода с электрическим управлением для управления силой, прилагаемой танцором.
ПРИМЕНИМЫЕ ТОВАРЫ
CLT2000-000 КОНТРОЛЛЕР CORTEX LT
9.) Режим скорости с управлением танцором
См. Раздел «F» о КОМПЕНСАЦИИ ТАНЦОВЩИКАМ. Вы найдете общее обсуждение механизмов и датчиков танцора, а также их характеристик и ограничений.
Использование компенсатора и регенеративного управления в режиме скорости вводит ряд отличий от методов управления крутящим моментом, описанных ранее.Благодаря контролю скорости двигателя намоточная машина всегда имеет полный крутящий момент. Типичные приводы, работающие в режиме скорости, могут создавать до 150% пикового крутящего момента, и при правильном размере сам привод будет вырабатывать сигналы компенсации трения и инерции, которые должны подаваться схемой управления натяжением в системах с режимом крутящего момента.
В целом, регулировка скорости позволяет работать с более легкими уровнями натяжения. Поскольку сила балансира устанавливает уровень натяжения полотна, конструкция и реализация балансира имеют решающее значение для правильной работы системы при желаемом уровне натяжения.Управление скоростью даже делает возможной работу без натяжения намотчиков и разматывателей, когда бесконтактные датчики, такие как ультразвуковые, используются для определения положения петли полотна.
Вот некоторые преимущества Dancer Control:
— Хранение в балке может обеспечить защиту полотна в переходных условиях, таких как ускорение и замедление, а также во время передачи рулонов на мотальных станках револьверной головки.
— Натяжение полотна относительно номинального крутящего момента намоточной машины может быть намного меньше, чем в системе управления крутящим моментом.Это обеспечивает легкое натяжение полотна, если танцор механически сконструирован так, чтобы реагировать на легкие уровни натяжения.
— Реверсирование линии намного проще, чем в системе управления крутящим моментом. Обычно для привода намотки используется регулятор двигателя рекуперативного типа, который позволяет реверсировать путем изменения полярности задания скорости.
Танцоры также имеют некоторые нежелательные характеристики или ограничения, многие из которых подробно описаны в Разделе F, «Компенсация танцорам».
Механизм Dancer связан с процессом самой сетью.Танцовщица должна точно отслеживать полотно, не искажая, не повреждая и не повышая уровень натяжения полотна. Эти потенциальные проблемы могут возникать при работе с эластичными лентами и материалами с очень низким натяжением, особенно на производственных линиях, которые были переделаны для работы с более легкими уровнями натяжения или более высокими скоростями, чем первоначально было предусмотрено.
Избегайте тенденции «уравновешивать» крупных танцоров, чтобы снизить напряжение. Масса танцора и противовес все еще имеет инерцию, которая может ограничивать реакцию.
Танцовщицы и их сенсоры также имеют движущиеся части, которые с возрастом изнашиваются, расшатываются, теряют смазку и иным образом вызывают горе.
На рисунке H.10 показано типичное управление танцором для забирающей машины с центральным приводом, использующее функцию «Управление положением танцора», PID, для первичного управления.
Балансир загружен воздушным цилиндром для установки натяжения. Для обеспечения наилучшего отклика и регулирования привода намотки отображается обратная связь по тахометру.Вход шкалы, использующий сигнал линейной скорости, может активизировать схему компенсатора для изменений линейной скорости. Обратитесь к Разделу F, Компенсация танцорам, для более полного объяснения этого преимущества. Альтернативным входным сигналом шкалы для изменений большого диаметра может быть использование устройства Sonictrac® для контроля диаметра рулона и масштабирования цепи управления балансиром в соответствии с размером рулона.
ПРИМЕНИМЫЕ ТОВАРЫ
D10541-000 КАРТА ПОЗИЦИИ ТАНЦОРА
CLT2000-000 КОНТРОЛЛЕР CORTEX LT
МИКРОМАНАДЖЕР MM3000-PID КОНТРОЛЛЕР
10.) Режим скорости с управлением делителем
Контроль скорости намотки или разматывателя с центральным приводом с использованием функциональной схемы делителя Carotron оказался очень эффективным методом управления. Эта функция особенно полезна в приложениях с большими коэффициентами сборки (изменения диаметра).
Для измерения диаметра доступно несколько методов. См. Раздел J.1 и рисунок H.7 для обсуждения использования ультразвука для измерения диаметра и взаимосвязи между диаметром центрального ветра и скоростью вращения.На этом рисунке показано, как можно использовать скорость центрального приводного двигателя для расчета диаметра для применений с обмоткой крутящего момента и как измеренный диаметр можно использовать для расчета скорости центрального приводного двигателя для получения постоянной скорости поверхности.
Другой метод измерения мог бы использовать устройство поворотного рычага «наездник», которое опирается на поверхность валка и имеет потенциометр, подключенный к точке поворота, для вращения и увеличения сигнала при подъеме рычага за счет увеличения диаметра валка.Бесконтактные методы будут использовать ультразвуковое зондирование или лазерное зондирование для обеспечения сигнала увеличивающегося диаметра. В эти методы должна быть включена логика для преобразования измеренного «расстояния», которое уменьшается с увеличением диаметра, в сигнал увеличения диаметра. Эта способность перевода является стандартной для устройств ультразвукового зондирования Carotron.
На рисунке H.11 показано типичное применение центрального ветра с использованием функциональной схемы делителя. Моторный привод работает в скоростном режиме, так что намоточная машина всегда имеет полный крутящий момент — при правильном размере.Ключевыми дополнениями в этой схеме управления являются функциональная схема делителя и средство измерения или расчета диаметра валка.
Балансир все еще используется для установки натяжения полотна и для обеспечения + «процентной» обрезки выходного сигнала функциональной карты разделителя. Дальнейшее улучшение характеристик может быть достигнуто путем включения функции «Положение танцора — PID» вместо функции триммирования танцора, чтобы повысить точность положения танцора и контроль натяжения.
ПРИМЕНИМЫЕ ТОВАРЫ
D10541-000 КАРТА КОНТРОЛЯ ПОЛОЖЕНИЯ ТАНЦОВЩИКА
D11005-000 ФУНКЦИОНАЛЬНАЯ ПЛАТА МУЛЬТИПЛИКАТОР / РАЗДЕЛИТЕЛЬ
CLT2000-000 КОНТРОЛЛЕР CORTEX LT
МИКРОМАНАДЖЕР MM3000-PID КОНТРОЛЛЕР
SMU100-XXX SONICTRAC®, УЛЬТРАЗВУКОВОЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК
STP200-000 SONICTRAC® PRO, УЛЬТРАЗВУКОВОЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК
Рисунок H.12 иллюстрирует приложение, в котором отсутствует «поверхностный приводной валок» или процесс для установки и управления «линейной скоростью». Сам моталка контролирует скорость полотна. Без компенсации диаметра скорость полотна будет увеличиваться с увеличением диаметра. Использование датчика диаметра и функциональной схемы «делителя» обеспечит постоянную скорость намотки с контролируемым диаметром тормозного усилия, используемым для контроля натяжения полотна. Эту схему управления можно переключать, где скорость «размотки» регулируется с помощью рекуперативного привода, а намотчик — крутящего момента.
ПРИМЕНИМЫЕ ТОВАРЫ
D11005-000 ФУНКЦИОНАЛЬНАЯ ПЛАТА МУЛЬТИПЛИКАТОР / РАЗДЕЛИТЕЛЬ
CLT2000-000 КОНТРОЛЛЕР CORTEX LT
КОНТРОЛЛЕР МИКРОМАНАДЖЕРА MM3000-CRG
SMU100-XXX SONICTRAC®, УЛЬТРАЗВУКОВОЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК
STP200-000 SONICTRAC® PRO, УЛЬТРАЗВУКОВОЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК
11.) Режим скорости с датчиком натяжения (тензодатчиком) управления
Управление датчиком натяженияс тензодатчиками, вероятно, является наиболее дорогостоящим подходом к контролю натяжения при обработке полотна.Весоизмерительные ячейки позволяют напрямую определять натяжение полотна и контролировать скорость намотки или крутящий момент. Реализованная так же, как система, управляемая танцором, обратная связь с датчиком натяжения может обеспечивать очень точное управление и отображать натяжение, но без некоторых преимуществ танцора.
На рисунке H.13 показан типичный метод использования весоизмерительного датчика в машине с центральным приводом. Выходной сигнал низкого уровня тензодатчиков может быть изолирован и усилен прецизионной биполярной изолирующей картой Carotron модели D10562-000.Затем усиленный сигнал можно сравнить с уставкой натяжения в функции ПИД для корректировки сигнала скорости центральной намоточной машины, который рассчитывается с использованием сигнала диаметра и функции делителя.
В компании Carotron мы называем тензодатчики «компенсаторами нулевого накопления». Очевидно, что хранилище материала не предусмотрено, и ограничение диапазона «контура регулирования натяжения» даже более критично, чем для танцоров. Это возлагает большую ответственность за управление на другие функции управления, такие как определение диаметра и расчет скорости центрального привода.Carotron не рекомендует 100% -ный контроль валков с центральным приводом только с помощью петли датчика натяжения.
В случае датчиков натяжения физический монтаж, угол намотки полотна, размер устройства, вибрация машины и балансировка роликов датчика являются одними из факторов, которые в значительной степени влияют на точность и стабильность датчика (ов) как чувствительного устройства. Электрический шум также может быть серьезной проблемой, поскольку некоторые датчики напряжения, тензодатчики, вырабатывают всего несколько милливольт при приложении полной номинальной силы.Обычно они требуют сопряжения со схемой управления через схему преобразования сигнала, которая может обеспечивать возбуждение, усиление и изоляцию.
Осторожно. следует принимать во внимание для решения каждой из этих проблем, особенно для применения с центральным ветром, поскольку диапазон регулирования контура натяжения должен соответствовать «диапазону уменьшения линейной скорости» и диапазону нарастания валков.
ПРИМЕНИМЫЕ ТОВАРЫ
D11005-000 ФУНКЦИОНАЛЬНАЯ ПЛАТА МУЛЬТИПЛИКАТОР / РАЗДЕЛИТЕЛЬ
CLT2000-000 КОНТРОЛЛЕР CORTEX LT
КОНТРОЛЛЕР МИКРОМАНАДЖЕРА MM3000-CRG
SMU100-XXX SONICTRAC®, УЛЬТРАЗВУКОВОЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК
STP200-000 SONICTRAC® PRO, УЛЬТРАЗВУКОВОЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК
D10562-000 ТОЧНАЯ БИПОЛЯРНАЯ ИЗОЛЯЦИОННАЯ КАРТА
LCA210-000 УСИЛИТЕЛЬ НАГРУЗОЧНОЙ ЯЧЕЙКИ
12.) Подъемники постоянной мощности
Большинство двигателей с инверторным режимом и некоторые двигатели постоянного тока со специальными номиналами имеют характеристики скорости выше номинальной базовой скорости. Этот тип работы со скоростью, превышающей базовую, называется режимом «постоянной мощности», когда крутящий момент двигателя заменяется на дополнительную скорость. В некоторых областях применения, включая мотальные станки с центральным приводом, приводы шпинделя и твердосплавные отрезные пилы, используется постоянная мощность в лошадиных силах.
При работе с постоянной мощностью приводы работают как регуляторы скорости, и при использовании в приложении с центральной намоткой по-прежнему требуется одна из логики режима скорости и схем управления, описанных ранее.Основное преимущество заключается в том, что номинальная мощность двигателя и привода (и связанные с этим затраты) могут быть намного ниже, чем при использовании обычного двигателя с базовой скоростью ~ 1750 об / мин.
A.) Постоянная работа привода постоянного тока HP
Использование регулятора тока возбуждения для подачи шунтирующего тока возбуждения двигателя постоянного тока позволяет снизить ток возбуждения двигателя выше базовой скорости, чтобы обеспечить возможность более высокой скорости. Управление двигателем постоянного тока будет работать в режиме регулирования напряжения якоря, приближающегося к базовой скорости, при этом регулятор возбуждения будет управлять от базовой скорости до расширенной скорости, уменьшая ток возбуждения.Этот метод управления иногда называют контролем «кроссовера поля» или «управления ослаблением поля». См. Рисунок H.14.
Важным аспектом этого метода управления является то, что фактический уровень напряжения якоря используется для управления уровнем тока возбуждения. Чтобы обеспечить полный крутящий момент в большей части диапазона базовой скорости, уменьшение тока возбуждения обычно задерживается до тех пор, пока напряжение якоря не превысит 90%. Для увеличения скорости 4: 1 за счет ослабления поля примерно 25% скорости двигателя достигается при напряжении якоря 90%.Последние 75% диапазона скорости затем достигаются с конечным увеличением напряжения якоря на ~ 10% или в пределах последних 10% диапазона регулировки потенциометра скорости, если привод работал с «обратной связью по якорю». По этой причине обратная связь тахометра или энкодера всегда используется для сохранения линейности диапазона скорости относительно задания скорости.
ПродуктыCarotron включают серию регуляторов полевого регулятора, которые могут управлять полями двигателя до 35 ампер. Это устройство можно использовать с приводами постоянного тока любой марки, чтобы обеспечить постоянную мощность в лошадиных силах.Приводы серии Elite Pro от Carotron имеют «встроенный» регулятор поля для упрощения настройки и управления мощностью до 700 лошадиных сил.
Важно помнить, что когда двигатель постоянного тока работает со скоростью выше базовой, теряется значительный крутящий момент. Двигатель постоянного тока будет работать с постоянным полным номинальным крутящим моментом вплоть до базовой скорости. Скорость выше базовой, двигатель должен работать в режиме постоянной мощности.
На рисунке H.15 показан пример двигателя постоянного тока с номинальной скоростью 1750 об / мин с расширенным диапазоном 2300 об / мин.Базовая скорость 500 об / мин с максимальной расширенной скоростью 3000 об / мин возможна в некоторых конструкциях двигателей. Такие двигатели с широким диапазоном скоростей построены с более крупными размерами рамы, поскольку для данной номинальной мощности при более низкой базовой скорости соответствующая мощность по крутящему моменту намного выше.
B.) Постоянная работа привода переменного тока HP
В приводах и двигателях с инвертором переменного тока работа с увеличенной скоростью достигается с помощью различных методов, но результаты практически такие же, как и с регуляторами постоянного тока и двигателями.Обычно инверторы подают на двигатель выходное напряжение, которое подается по уровню и частоте с постоянным соотношением вольт-герц. Это означает, что для двигателя, рассчитанного на 460 В переменного тока, максимум 60 Гц для номинальной базовой скорости, потребуется 230 В переменного тока при 30 Гц при 1/2 скорости или 46 В переменного тока при 6 Гц при 1/10 скорости. В этом диапазоне доступен полный номинальный крутящий момент двигателя.
Для достижения «постоянной мощности» увеличения скорости инвертор можно запрограммировать на продолжение увеличения выходной частоты выше 60 Гц, удерживая напряжение на номинальном максимуме.Как и в случае с приводами постоянного тока и двигателями, имеющийся крутящий момент должен быть снижен. Некоторые инверторы имеют диапазон выходной частоты до 400 Гц, что позволяет увеличить скорость более 6: 1. Обычно это можно сделать со стандартным двигателем с инверторным режимом — основной предел заключается в том, что ток полной нагрузки инвертора и / или двигателя не должен превышаться. Следовательно, характеристика нагрузки приложения должна соответствовать профилю «постоянной мощности», при котором нагрузка двигателя не увеличивается с увеличением скорости.
ПРИМЕНИМЫЕ ТОВАРЫ
ОРГАНЫ УПРАВЛЕНИЯ ПОЛЕВЫМ РЕГУЛЯТОРОМ FR1000-000 И FR3500-000
ЦИФРОВОЙ ПРИВОД постоянного тока ELITE PRO СЕРИИ
СИСТЕМЫ УПРАВЛЕНИЯ ИНВЕРТОРОМ ПЕРЕМЕННОГО ТОКА — ПОЛУЧИТЕ ДОСТУПНЫЕ МОДЕЛИ
ЗАВОДАПредыдущий «Поверхностные приводные валки и приемные устройства» • Вернуться к указателю • Следующий «Контроль натяжения зоны»
Перейти к линейке продуктов • Перейти к приводам постоянного тока и принадлежностям • Перейти к компонентам интерфейса системы
Руководство по применению систем управления УказательОптимизация контроля натяжения в намоточных машинах с центральным приводом
Денис Морозов
Подвижные и разматывающие устройства с центральным приводом попадают в постоянно меняющуюся нагрузку, поскольку они обрабатывают и регулируют натяжение полотна.Изменение диаметра рулона требует, чтобы система управления постоянно адаптировалась к правильной скорости вращения шпинделя и эффективно справлялась с изменениями массы рулона, обеспечивая при этом точное управление натяжением полотна.
Типичные внутренние компоненты системы управления натяжением центрального ветра могут включать:
- Вычислитель диаметра
- Контроллер процесса с обратной связью (например, ПИД-регулятор)
- Калькулятор инерции
Через эти взаимосвязанные модули устанавливаются контроллер натяжения, скорость привода, уставки и рабочие параметры контроллера тока.Эти компоненты регулятора натяжения и производимые ими параметры процесса напрямую зависят от точности фактического диаметра валка.
Точность компонента вычислителя диаметра очень важна для производительности системы до такой степени, что он может считаться наиболее важным элементом в системе управления.
Фактический диаметр рулона может быть измерен датчиком или рассчитан с использованием входных значений движения полотна и шпинделя. Поскольку диаметр измерительного ролика обычно подходит только для начальной или начальной настройки, рабочий диаметр рассчитывается многократно во время процесса.Существует множество технологий для расчета рабочего диаметра, но режимы, в которых используются фактические или производные изменения положения в полотне и шпинделе, могут обеспечить более высокую производительность.
Здесь мы обсудим концепции управления натяжением, возможные методы расчета диаметра, режимы расчета оптимального диаметра и сложное взаимодействие между расчетом диаметра и контроллером технологии натяжения в отношении производительности.
Концепции и расчеты
Существуют различные методы управления, которые могут применяться к лебедкам с центральным приводом: например, управление крутящим моментом или скоростью.В этой статье основное внимание будет уделено теории управления намоточной машиной на основе скорости, хотя многие результаты, касающиеся методов расчета диаметра, могут быть легко применены к намоточным машинам с контролем крутящего момента. В мотальной машине с центральным приводом с регулируемой скоростью двигатель шпинделя выполняет две основные функции: он соответствует линейной скорости машины и поддерживает постоянное натяжение полотна.
Для обеспечения постоянной скорости полотна ( v ) угловая скорость шпинделя должна уменьшаться по мере увеличения диаметра рулона.Связь между угловой скоростью шпинделя и поверхностной скоростью полотна показана на рис. 1 .
Скорость машины определяется двигателем прижимного ролика, который является частью той же системы управления приводом, или измеряется внешним датчиком положения. Чтобы получить правильную угловую скорость вращения шпинделя ( w ), необходимо рассчитать или измерить диаметр ( D ) валка.
Методы натяжения и контроля сети
В мотальной машине с центральным приводом с регулируемой скоростью можно использовать два метода контроля натяжения:
- Тензодатчик можно использовать для измерения натяжения полотна.Контроллер натяжения изменяет скорость шпинделя на основе показания датчика веса .
- Можно использовать свободно движущийся механизм балансира с предварительной нагрузкой. Обратная связь по отклонению положения компенсатора используется контроллером положения для регулировки угловой скорости шпинделя .
Как контроллер положения для систем на основе балансира, так и контроллер натяжения для систем на основе тензодатчиков обычно называют технологическими контроллерами (см. , рис. 3, ).
Технологический контроллер — это система управления с обратной связью, которая применяет коррекцию на основе разницы между заданным и фактическим значениями.Заданное значение по сравнению с фактической разницей масштабируется с помощью коэффициента, называемого пропорциональным усилением. Также применяется интегральная и дифференциальная составляющие. Термин «ПИД-регулятор» также обычно используется для обозначения этого расчета.
Измерения
Как указано, диаметр валка необходим для того, чтобы правильно рассчитать угловую скорость вращения шпинделя, чтобы она соответствовала линейной скорости полотна. Расчет диаметра может быть выполнен либо прямым измерением, либо расчетом системы привода.
Прямое измерение диаметра (см. , рис. 4, ) выполняется с помощью ультразвукового датчика или рулона, прикрепленного к измерительному устройству, например, потенциометра или энкодера. Методы прямого измерения зависят от механических и электрических факторов, связанных с эксплуатацией и техническим обслуживанием измерительных устройств и задействованной механики.
Методы расчета диаметра на основе приводавключают добавление толщины материала, скорость полотна относительно оборотов вала намотки ( v / n ), интеграцию скорости полотна и расчет на основе положения.Для всех методов расчета диаметра на основе привода требуется начальная настройка. Начальный диаметр можно определить одним из трех способов:
- Прямой ввод оператора
- Метод прямого измерения диаметра
- В системах на основе балансира можно проанализировать смещение балансира в зависимости от угла поворота шпинделя во время процедуры натяжения, как показано на Рис. 5
Добавление толщины материала является потенциально наиболее точным методом расчета диаметра.Толщина раневого материала прибавляется к диаметру каждый оборот.
Кроме того, точность расчета зависит от трех факторов:
- Точность начального диаметра
- Точность заданной толщины полотна
- Постоянство толщины полотна материала и способность формировать рулон с заданной толщиной полотна. Воздух, попавший между витками материала, изменит диаметр рулона.
При расчете скорости полотна относительно скорости диаметра вала намотки, диаметр ( D ) определяется с использованием соотношения между поверхностной скоростью полотна ( v ) и угловой скоростью шпинделя ( w ) с использованием формул, приведенных на рисунке Рис. 1 .В расчетах используются мгновенные значения скорости.
При вычислении интегрирования скорости полотна скорость интегрируется с течением времени для определения линейного положения полотна и углового смещения шпинделя.
Затем диаметр рассчитывается на основе расстояния между стенками ( S ) и углового смещения ( θ ).
При вычислении диаметра на основе положения положение измеряется непосредственно по шпинделю и смещению прижимного ролика, а диаметр рассчитывается непосредственно с использованием вышеуказанного расчета диаметра.Ссылка на позицию должна быть доступна для выполнения этого расчета.
Основы намоточного устройства
Намотка материала в катушку — это обычное приложение для автоматизации , в основе которого лежит множество технологий. Намоточные машины используются во многих отраслях промышленности. Толщина материала может варьироваться от толстой стали, тонкого пластика, стандартной бумаги, алюминиевой фольги до даже туалетной бумаги. Практически любой материал, который можно свернуть в бухту для более экономичной транспортировки и доставки заказчику, наматывается на моталку.В целом, чем ниже стоимость материала, тем быстрее должны работать производители для эффективного производства своей продукции. Некоторые из этих продуктов могут работать со скоростью многие тысячи футов в минуту.
Термины намоткиОправка — Оправка — это то, на что наматывается материал. Некоторые оправки идут в комплекте с материалом, например, картон в рулоне бумажных полотенец, а некоторые остаются в машине. В некоторых случаях, например, при прокатке стали, рулон снимается со станка без оправки.
PLI — фунтов на линейный дюйм — это обычная единица измерения, используемая в обмотках. Это количество фунтов силы натяжения на каждый линейный дюйм ширины материала. Например, если наматывать бумагу шириной 20 дюймов при 5 PLI, мы просим 100 фунтов натяжения.
Обрыв полосы — это когда наматываемый материал разрывается. Обычно это причина как можно быстрее остановить систему.
Какая технология используется при намотке?Процесс намотки многогранен.Некоторые приложения намотки очень быстрые и сложные, а другие — медленные и простые, но в большинстве используются некоторые из следующих технологий.
Определение диаметра
Чтобы приложить правильную величину натяжения к наматываемому «полотну» материала, необходимо определить точный диаметр. Диаметр можно определить разными способами. Распространенным методом является расчет текущего диаметра на основе соотношения между линейной скоростью системы, определяемой энкодером или прижимным роликом какого-либо типа, и числом оборотов в минуту, которое вращает намоточное устройство.Например, если леска движется со скоростью 60 футов в минуту, а намоточное устройство вращается со скоростью 4 оборота в минуту, тогда окружность катушки на намотчике должна быть 15 футов. Затем диаметр рассчитывается на основе длины окружности. Другой вариант определения диаметра — датчик звукового или лазерного типа, расположенный напротив катушки. Они должны быть очень стабильными и периодически калиброваться для обеспечения точности. Другой метод заключается в использовании «верхового ролика» поверх катушки. Этот рулон движется сверху катушки и поднимается из-за того, что катушка растет под ним.К этому рулону прикреплен какой-то датчик, и диаметр можно определить, считывая высоту рулона.
Контроль натяжения
Натяжение можно контролировать разными способами в системе намотки. Распространенный способ — ролл танцора. Валок с пневматическим или гидравлическим цилиндром регулируется при заданном давлении в направлении, противоположном намоточной машине. Материал оборачивается вокруг этого рулона, а затем оборачивается вокруг намоточного устройства. Крен балансира контролируется датчиком положения, например, энкодером, потенциометром или датчиком.Система намотки считывает положение и либо ускоряется, либо замедляется, чтобы поддерживать положение, которое определено где-то в середине диапазона движения танцора. Этот метод динамически изменяет скорость намотки.
Второй метод — использовать датчик веса для определения натяжения. Намотчик может считывать натяжение материала и соответствующим образом регулировать его скорость и крутящий момент.
Более продвинутый метод заключается в использовании расчетного значения крутящего момента привода для регулирования натяжения материала.Это предпочтительный метод, поскольку он исключает необходимость обслуживания дополнительных датчиков и исполнительных механизмов, необходимых для других методов. Этот метод хорошо работает, когда двигатель правильно подобран для приложения, чтобы можно было использовать полное разрешение обратной связи по крутящему моменту и управления.
За кулисами на заводе происходит так много всего, что все это не уместится в короткой статье, но некоторые другие области, которые мы принимаем во внимание, подходят;
- Конусное натяжение — изменение натяжения в процессе для получения валка лучшей формы, помогая устранить конусность или телескопирование
- Фиксированная и переменная компенсация инерции — компенсация инерции рулонного материала во время пусков, остановок и изменений скорости для предотвращения провисания или чрезмерного натяжения полотна.
- Friction and Windage — Компенсация трения и механических потерь компонентов обмотки машины
Заключение
В заключение, каламбур: все приложения для намотки различаются и не подходят для формования печенья. Создавая, настраивая или изменяя приложение для намотки, вам нужно работать с кем-то, у кого есть опыт, который может помочь вам выбрать правильную технологию, не упрощая или не усложняя ваш процесс. Команда инженеров и обслуживающего персонала Premier Automation являются экспертами в своей области, они разработали и разработали сотни приложений для обмоток. Свяжитесь с Premier Automation , если вам потребуется намотка.
Намотчики и разматыватели с центром: обзор частотно-регулируемого привода и привода постоянного тока
Подъемные устройства с центральным приводомили разматыватели с центром являются одними из самых сложных приложений, для которых требуется настроить частотно-регулируемый привод или привод постоянного тока. Ниже приводится краткий обзор.
(ПРИМЕЧАНИЕ. Если у вас возникли проблемы с обслуживанием намоточного устройства или разматывателя, свяжитесь с нами, позвонив по телефону 800-848-2504800-848-2504 ИЛИ одним из способов справа на этой странице) Когда я впервые попал в приводной бизнес, большинство приводов были аналоговыми.Установка намотки или размотчика с использованием аналоговых приводов была очень обременительной. Почти всегда требовалось несколько внешних компонентов для выполнения расчетов диаметра, согласования скорости, позиционирования балансира, управления весоизмерительными датчиками и обеспечения задания скорости и крутящего момента.
Не только это, но поскольку для большинства намоточных машин требуется сужение натяжения, натяжение срыва и другая логика, обычно требовалось несколько реле или небольшой ПЛК.
Поскольку регулировка часто выполнялась с помощью потенциометров, которые со временем изменялись как в зависимости от окружающей среды, так и из-за действий пользователя, они требовали периодической корректировки.Это не всегда было просто и часто приводило как к простою, так и к повреждению материалов. (раньше мы раздавали «настройщиков» и шутили с обслуживающим персоналом завода, что они застраховывали нас от дополнительных обращений в сервисный центр)
До появления приводов переменного тока с векторным управлением почти все приложения с центральным намоточным устройством управлялись приводами постоянного тока. EMA работала и продолжает время от времени работать над старыми намоточными машинами Reliance MaxPak, намоточными машинами Louis Allis Winders, GE Drive и другими. Позже, когда цифровые приводы постоянного тока стали обычным явлением, мы сделали ряд намоточных устройств с использованием приводов постоянного тока Emerson Mentor или Quantum, приводов постоянного тока SSD и приводов постоянного тока Bardac.
Как правило, при отсутствии материала на сердечнике намотчик настраивается на линейную скорость, а также дополнительное натяжение, необходимое для материала. Поскольку в этот момент на валок приходится очень мало веса, требуемый крутящий момент невелик. Итак, на данный момент у вас есть классическое приложение постоянной мощности с высокой скоростью и низким крутящим моментом.
По мере наращивания рулона и увеличения диаметра скорость должна снижаться пропорционально накоплению материала, но, поскольку вес также увеличивается, крутящий момент должен увеличиваться.Таким образом, в конце, при полном крене, требуется полный крутящий момент при относительно низкой скорости.
На рисунке выше изображена система управления Louis Allis, созданная много лет назад, которая была разработана для регулирования центрального намоточного устройства вихретоковой муфты. Поскольку вихретоковая муфта — это, по сути, машина крутящего момента, эта плата сравнивала линейную скорость с фактической скоростью намотки, чтобы рассчитать накопление материала. Затем это позволило увеличить эталонный крутящий момент, что позволило удерживать центральную намоточную машину с желаемым натяжением.WK2 в нижнем левом углу был дифференцированным эталоном линейной скорости, целью которого было регулирование крутящего момента для поддержания напряжения во время ускорения и замедления. Глядя на это, вы можете увидеть внутренние проблемы настройки.
Если используется размотчик с центральным приводом, то операция просто обратная. Вы начинаете с полного рулона, а в конце — в ядре.
Способ управления центральной намоточной машиной или центральной размоткой зависит как от конструкции, так и от наматываемого материала.При работе с более тяжелыми материалами многие дизайнеры просто используют калькулятор диаметра для косвенного управления валком. Они существуют уже много лет и хорошо работают.
В других ситуациях требуются датчики веса, компенсаторы или более сложные средства для управления скоростью и крутящим моментом. Несмотря на это, общая физика такая же.
С появлением микропроцессоров накопители стали иметь значительно большую внутреннюю вычислительную мощность, и большинство производителей накопителей начали внедрять алгоритмы центрального намоточного устройства и обработки внутри накопителя.Как в приводах постоянного тока, так и в приводах переменного тока векторного типа, сейчас обычным явлением является то, что ПИД-регуляторы, калькуляторы диаметра, суммирующие соединения и расширенная логика находятся внутри частотно-регулируемого привода или привода постоянного тока. Производители приводов, которые обслуживают приложения системного типа, включили специальное программное обеспечение CTCW (намоточные устройства с постоянным натяжением) и SPW (программы намотки для ускорения) в свои частотно-регулируемые приводы и приводы постоянного тока. Большинство системных приводов могут принимать от четырех до пяти отдельных аналоговых входов одновременно.
Привод Bardac, в частности, дает инженеру / технику гибкость для включения ПИД-регуляторов в эти аналоговые входы, если они сочтут это необходимым.
Преимущество этого, с точки зрения заказчика, состоит в том, что нет необходимости покупать некоторое количество вспомогательных печатных плат и контроллеров, чтобы позволить ЧРП или приводу постоянного тока управлять намоточным или разматывающим устройством.
EMA имеет опыт настройки Winders и Unwinders не только с дисками Bardac PLX и SSD 590 Plus, но также с дисками Control Techniques Mentor / Quantum III. Mentor / Quantum III использует дополнительный базовый процессор, называемый картой MD29, который представляет собой отдельный контроллер, который обрабатывает инструкции CTCW и PID.